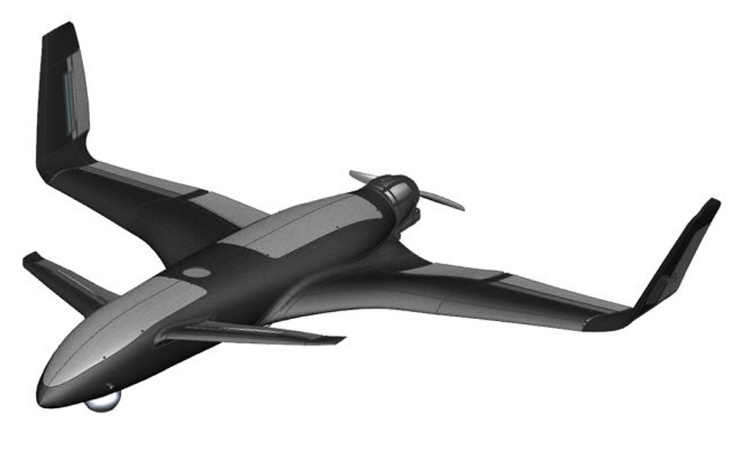
I am doing some proactive research on the applicability of a Pixhawk 2.1 Cube in a UAV system that has a pretty abnormal design. We are working on a delta-wing type UAV, with three control surfaces on each wing (ail, ele & rud), as well as canards.
Attached is a picture of the complex delta-wing UAV that shows what I am referring to, the inner control surface are essentially the elevators, the outer control surfaces on the wings are the ailerons, the rudders are on the winglets that sweep upwards, and the canards on the nose.
The canards will only be used for pitch trim, so it won’t be necessary to autonomously control them; however, I would like to know from experienced arudpilot users whether it will be possible to configure the Cube to autonomously fly an airframe like this one, and whether the default PIDs will be completely out of whack, or a good starting point.
yes, ArduPilot can be configured for a plane like that. You can treat each of those control surfaces as an aileron, elevon or rudder. Together they provide the control you need.
I can’t predict by looking at the airframe what tuning it would need, as that depends on far too many factors that are not visible in a picture like this.
If you are putting considerable effort into this project you may wish to create a RealFlight8 model of the airframe, so you can fly it in SITL before you fly the real vehicle.
Cheers, Tridge
Thank you very much. We actually have a relatively accurate X-Plane model of this air frame, so I’ll definitely do some SITL with it, hopefully that should be a good idea of the PID parameters that may be necessary for initial fly-by-wire flight modes… at least to get into the auto-tuning stage.
I don’t think Arduplane supports HIL with servos in the loop, I think PX4 does, but the performances isn’t very good from what I’ve heard. You can use X-Plane or RealFlight to create models as far as I know, and from the looks of it, SITL works quite well with Ardupilot and X-Plane.
Hello @JosuaB
Thanks a lot, i am also working on a canard type aircraft which i want to do simulation of. Do you have any experience of tuning the plane in SITL?