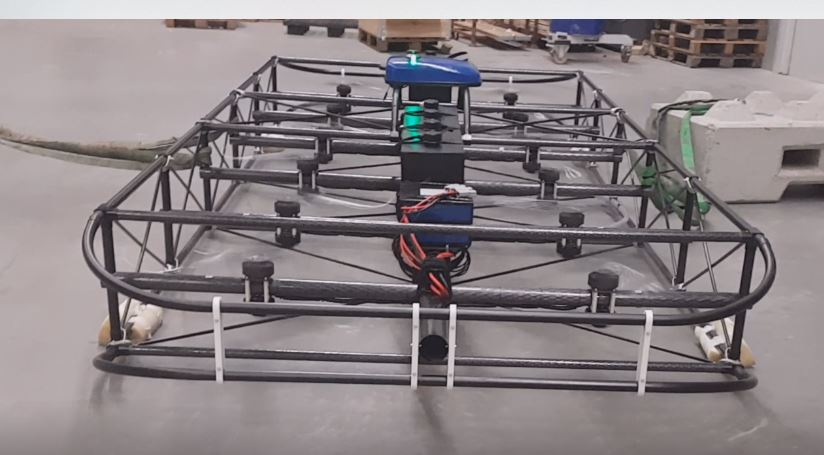
Hi Guys, we started a project with a super size drone: not conventional but with 50 kg to 80 kg of payload. It is to be used in agriculture, spreading leaf fertilizer. The system has a pixhawk cube and laser for altitude control. it is a non symetric octoquad config and pitch and roll are 1 to 2.4: so the role movement force points are 2.4 meter apart and the pitch movement is ca 1. m. Then as for safety we caged the 24 props with a frame around. and the batteries and tanks are placed wide over the span. Pictures explain more so have a look.
for some reason the drone is slowly responding, and like a slow moving and oscillating system and does not respond swiftly to the commands. It sometimes gets into a oscilation that feels dangerous. We do not go high because of safety. (about 50 cm above ground). But we want to improve on it.
We went to high and low PID’s but feel the system is quite inert. Unless using high PID of 1.95, 0.185, and 0.004, but stil we have risk of sudden oscillation. All this in was tested in stabilize mode. Altmode was OK, but created a bungy jump effect when lowering or increasing the height.
Can somebody tell us:
- when bigger drones, what is tendency for PID values; eg all lower or all higher
- Is there values of P, I or D that need increasing/decreasing with a bigger slow inertia craft.
- Large inertia: is there any resolution or do we have to conclude it falls out of the tuning possibility?
- What is the possibility to get rid of oscillations?
- Is the problem that we fly relatively low in ground effect ?
Hope to hear as we aim to finish our project!
