Tradheli Users,
I am creating this post to capture your requests for improvements to the trad heli wiki. Please reply to this post with your suggestions to improve the wiki.
So far I know that there probably needs to a few videos. One for the RSC set up and another for the notch filter. These would be in addition to the wiki that is already there.
From the suggestions, I will create a list in an issue in the wiki GitHub repo that I will link here.
Not promising that we will take on all of your suggestions but we can prioritize and work on them as we have time.
One thing I would like to suggest to improve is the swashplate configuration.
The following video would be a great example to explain the theory behind the swashplate: https://youtu.be/MH1emIx5Ubs
@DHANESH_KUMARESWARAN Thanks for your feedback. To clarify, you are not looking to change how the swashplate is configured but just to provide some education on how the swashplate controls the rotor response. That feeds into a change that I’ve been meaning to get to which is including the phase angle adjustment for all swashplate types. Which the training on rotor dynamics could help users understand as well. There is a lot of coupling cause by the rotor heads that are used on small sport helicopters which the phase angle can help reduce. Thanks again.
A simple checklist for new setups would be helpful, maybe even for vets just to make sure no critical steps are forgotten when configuring a new flight controller in a new aircraft.
Is there a place for wiki feedback as we run in to thing? It would be easier for me to suggest updates when at that point where I just struggled with an issue and either figured it out or got help, that way I can give better feedback then just saying a part of the wiki didn’t work and instead can have fresh in my mind something to contribute. Id really like to be able to be more helpful than just saying a part of the wiki was confusing.
Off the top of my head the two area where I just struggle understanding what sort of config I needed to do was with the governor setup (hobbywing platinum v4 type for was not clear what type that was in ardupilot) and the vibration notch filtering that I still am working on understanding better. For the vibrations unfortunately I dont any good suggestion but can tell you I followed through and did not get it working right an am still not clear on if my heli is to viby. It flys ok the way it is but probably could be better. It appears those are the two categories you are already planning on trying to enhance.
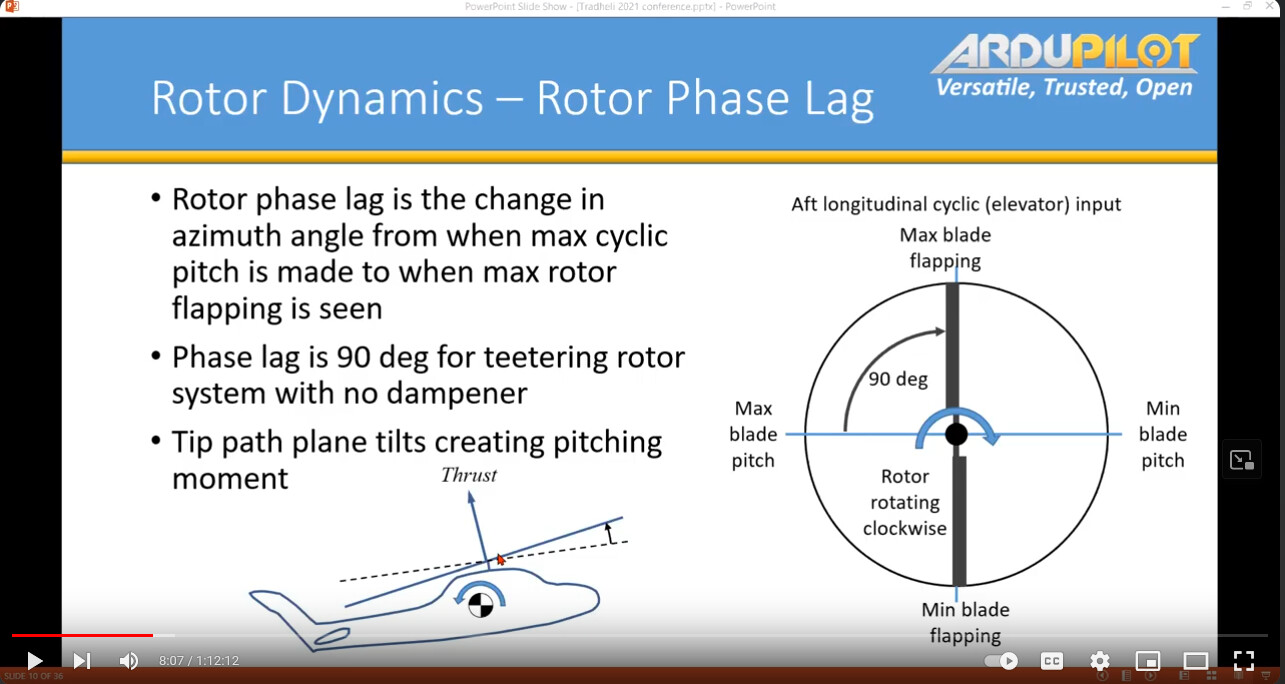
@DHANESH_KUMARESWARAN please review the first 10 min of this talk and tell me if this makes sense. It describes the concept of rotor phase lag but in a little different way. And discusses why you can experience coupling even if your swashplate is making the blade pitch inputs 90 deg prior to the desired response.
If you think this works better, I can extract it out and add it to the wiki.
The wiki page I’ve been pouring over is pretty short and for a first time setup leaves out some things. I’ve been looking at this post and this post and they suggest some different initial setups.
It would be good to clarify when does one need H_COL2YAW? Is this for “UAV” flying or for aerobatic? (the posts above suggest aerobatic, but that is all pre version 4.4)
The threads I linked above suggest that setting the tail rotor pitch to neutral and let the PID loop do the rest is enough. The wiki suggests setting tail rotor pitch (SERVOx_TRIM) to the value needed for hover. What is the current accepted wisdom with newer versions of AC?
Also, on the topic of tail rotors: A comment somewhere on Narrow Band Servos would be handy. In all the airplanes I’ve built I’ve never run into one of these but I guess they’re a thing in helicopters? A search of the forum here shows me the use of these servos is a bit contested and there are various opinions. I’m not too worried about that. What I know is the OMP M4 kit includes one of these servos and MP doesn’t let you just drop the SERVOx_MIN/MAX values that low in the configuration tab until you go into the full parameter list. Not a big deal, but wasted a lot of time on that teachable moment.
@spova if you have a GitHub account, then you can submit issues or pull requests directly to the ardupilot_wilki repository. Here is a link to the GitHub site
The web interface might be the easiest way to modify or suggest changes. You would have to fork the ardupilot_wiki repo and make changes to your fork. Then you can submit a pull request.
Is there a simple checklist for setting up a new arduheli to make sure none of the critical settings are missed? Something for people already somewhat familiar but just to make sure nothing is missed before the first flight?
Hi @bnsgeyer, I just came across something that might be a valuable addition to the written wiki.
I’ve been (very) slowly picking away at a couple of builds and I’m getting ready for auto-tune. I’ve been reading over the wiki pages, but admittedly not watching all the videos. (I guess I’m old enough that I’ll read the webpage before watching the videos…). Anyhow, I just watched the video about prepping for tuning and discovered your discussion on PIDx.I saturation. Based on the wiki my heli is hovering well with little or no drift so I was getting ready to continue to the next step, but now after watching the video I see the I-term nearly saturated for both pitch and roll.
TLDR: Add in discussion of I-term saturation and how to fix it to the notes about hover trim. Thanks!