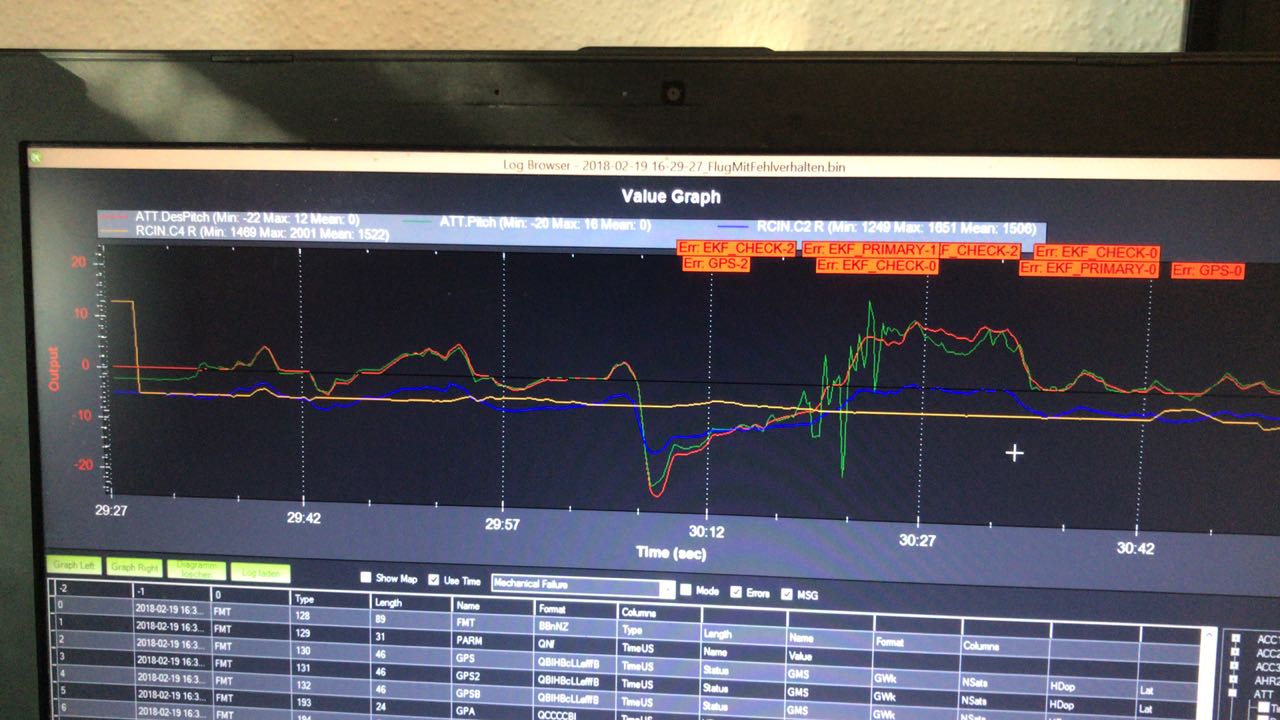
Our copter suddenly oscillate on nick during a fast flight. What is happened here?
Fast Flight Begins -> YAW drift slowly (Pilot corrected it) -> Copter oscillated (Hard Braking Manouver) for 5 seconds until it hovers normal - than bring it slowly and carefully back and yaw twitches a couple of times 10 degrees.
Excessive vibration - not sure why the VIBE figures are low but the IMU figures show it’s rattling it’s nuts off.
Premature takeoff before GPS has settled. You need to give the EKF time to settle these days, and it can take several minutes. If you have a guided mode, like loiter, switch to it on the ground and wait until you get the green LED, switch back to whatever mode you like and fly.
Be aware that in altitude hold mode it will put the brakes on if the commanded angle starts to lose height.
Just because you have a green LED in Stab and AltHold does not mean the EKF has settled.
You will discover this if, after getting a green LED in Stab or AltHold, you switch to PosHold or Loiter the LED will go blue (before arming). This is an anomaly the Dev’s are aware of and are looking into.
So if you take off too soon you will an EKF reset during flight at some stage.
You haven’t said how it flies in Stab?
The oscillation you describe in fast flight is the copter maintaining altitude, as you have it in AltHold.
As you push for speed, the angle increases until the copter is using all it’s power to increase speed but suddenly notices it is losing altitude, so what can it do? It can’t increase power any more so it has to back the angle off.
The amount of “oscillation” can be changed by changing parameters, so I would suggest you read through the Wiki.