Hi Looking for an experienced eye to look over a log for me.
I’m experiencing a much less stable flight with very bad altitude maintenance, hardly any control other than at extreme throttle on the sticks. I think judging for the logs that the octo is finding it hard to maintain yaw position and counterclockwise motors rc3,rc4,rc5,rc6 are outputting very little in these drop situations. I’ve checked motor angles and made sure they’re perfectly straight.The octo was flying well with the same setup a couple of days ago. Appreciate any advice. Here’s the log and param file.
Poor altitude hold is usually an indicator of too much vibration getting through to the IMU.
Although your X and Y spike quite a bit they don’t look excessive and even though the Z is not too bad it does seem to bounce around quite a bit.
Is the FC secure in it’s mount?
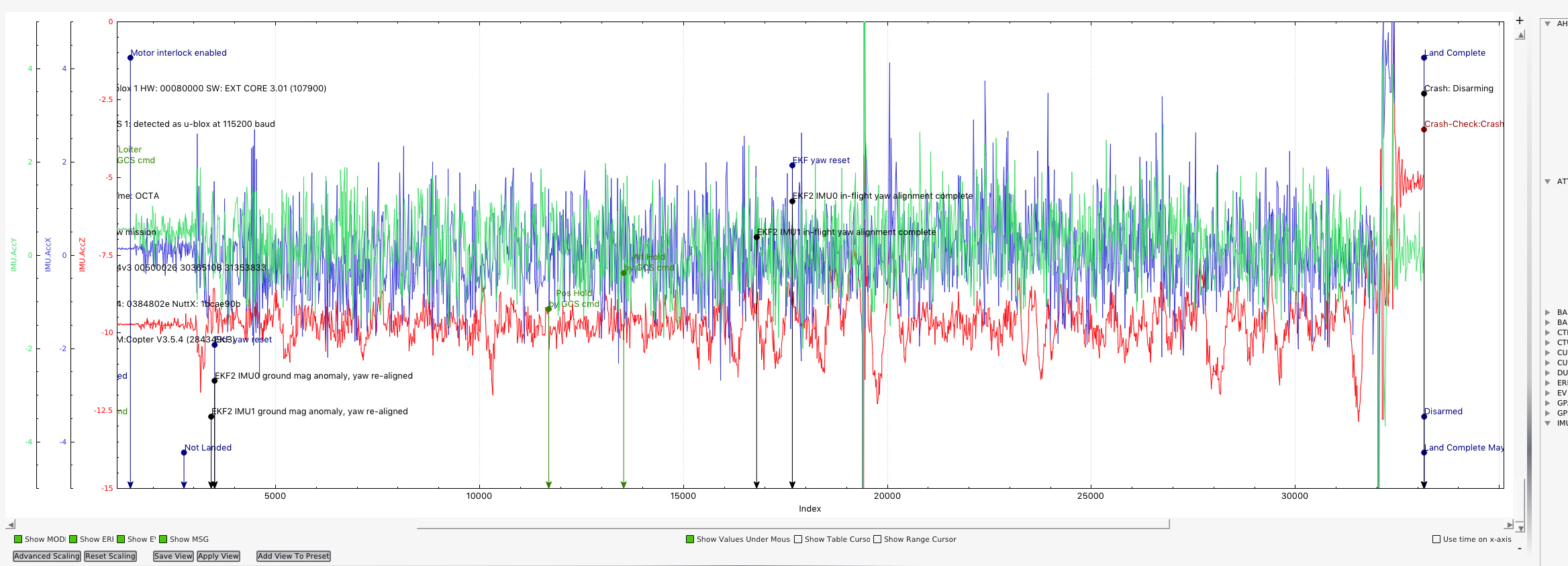
Your Desired to actual roll and pitch is a bit off.
Have you done an autotune?
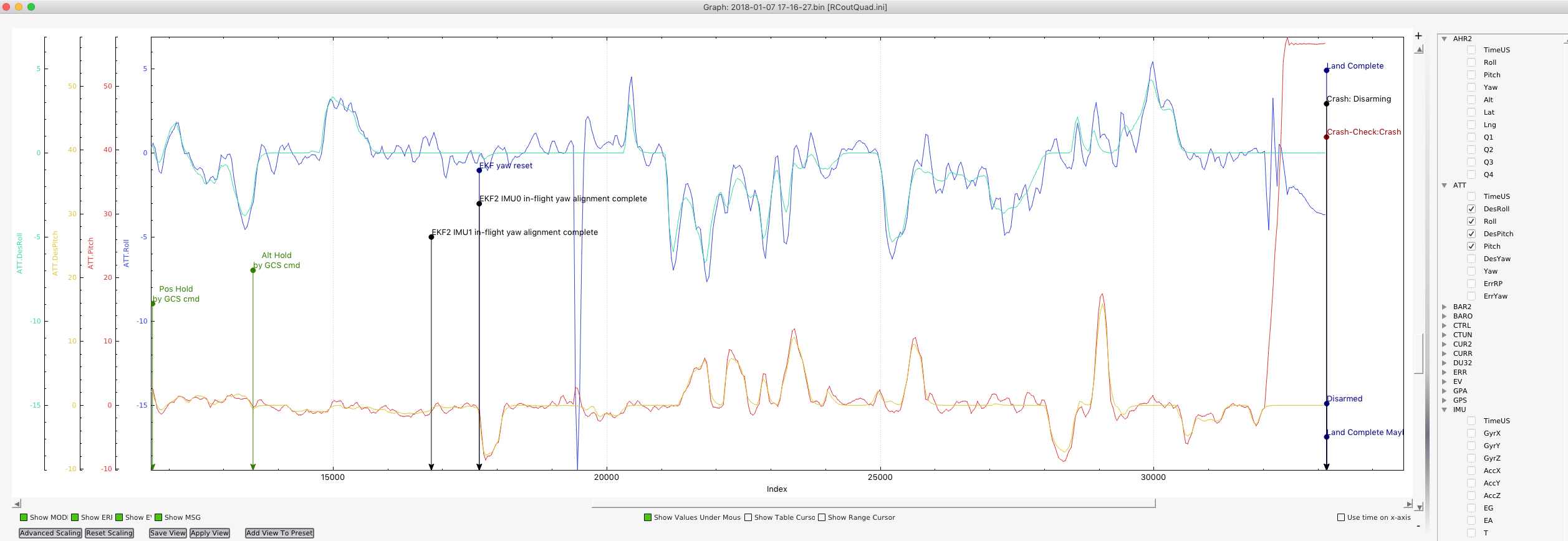
Flying it in Alt hold without getting stabilise working correctly is asking for problems.
Rather than dump the copter you could have switched to Stab to land.
You seem to be driving it mostly from the GCS, setting your flight modes, rather than using a transmitter switch.
Just wondering why?
With a poor tune, and a heavy/underpowered copter, it not surprising you are having issues.
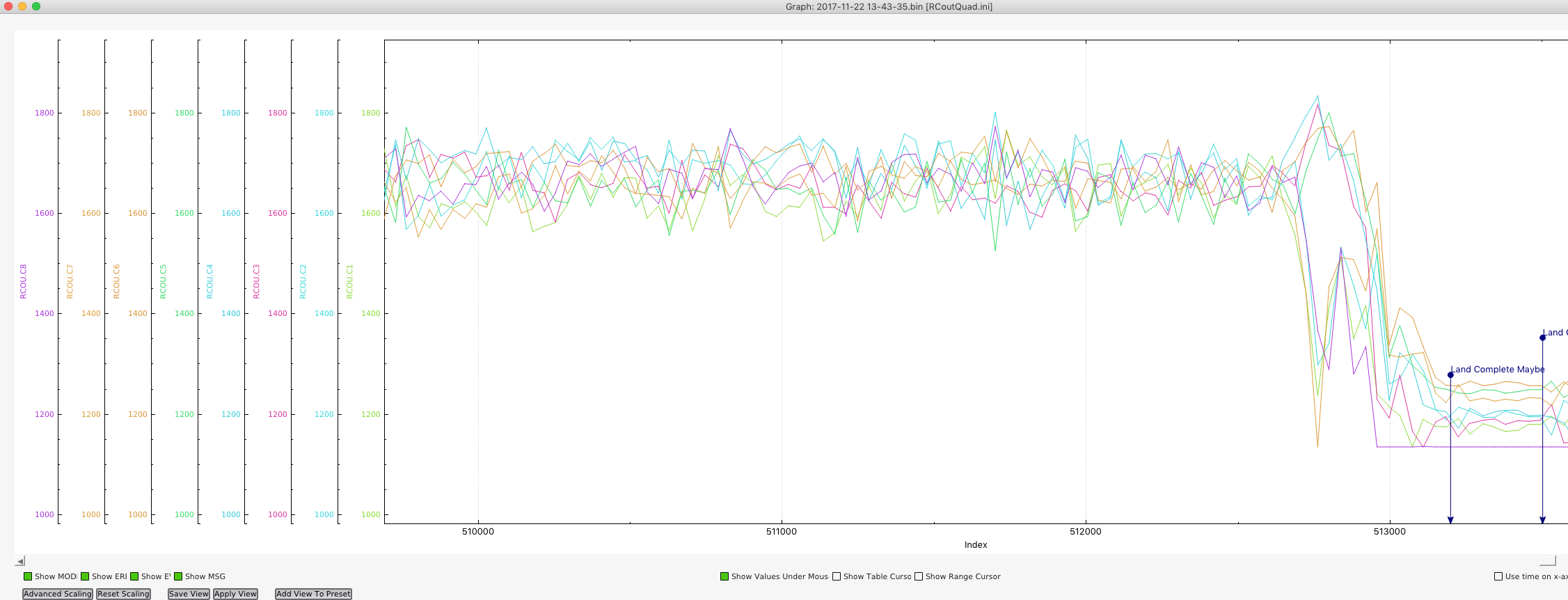
Your motors are maxed out most of the time leaving very little for stabilisation.

I agree with Mike, your copter in underpowered , compass not well calibrated and you battery is not in a great shape.
Thanks for the detailed analysis.
The same issues are apparent in stabilise.
I’ve been flying that setup for while without problem with that tune, it’s quite a sudden change. Which may (but I had been working well with it) coincide with a new controller setup. I’m using a 3dr solo board and controller to transmit video, controls and telemetry. So changing flight mode is done via mavlink.
I’d noticed that the roll and pitch weren’t dialed in. But previous flights they had been. I’ll recalibrate and tune tomorrow and have another go.
Yep those batteries are old but light, just using to test. It should be between 50-65% thrust for hover, so it’s very strange that it’s outputting that much to maintain hover.
Which is leading me to think one motor isn’t outputting properly.
I’ve uploaded a previous log (same link) with the same setup and tune for comparison.
From the previous log you are still using about 1650 out of 1800 to hover.
That is very little headroom for stabilisation.
So your margins for error are very little.
Any change in weight/turbulence/available power/tuning is going to throw the copter right off.
Yep. Very turbulent location. Less weight than normal but pushing it. I’ll retune, calibrate and hopefully I’ll have something usable. I thought the parameters for that flight set throttle hover at 65% which I would have thought less stressful than what the RC out is telling us. I thought 65% was ok for a smooth flying aerial rig.
Thanks for the insight Mike given me more to think about.
Right redone compass calibration and got a nice autotune. Things back to normal relatively.
The power issue is a concern and one thing I have noticed my current solo controller only outputs up to 1860 on rc3 (trust) my previous Taranis went up to 2006. MOT_PWM_MAX is set to RC_limit which is defined by controller calibration so right off the bat i’m losing 150 PWM of power at the top end.
Should I set MOT_PWM_MAX to a higher limit (up to 2200) if I am confident that the motor/esc can handle the power?
Is the rc_3 input scalable, so if I do add to the MOT_PWM_MAX value I will actually be able to get a higher thrust value than the controller will output? Obviously limiting it to below the MOT_PWM_MAX value so stability can be maintained.
The outputs should be reset with an RC calibration.
Have you recalibrated the RC?
Yes the output limit has been set to the new RC calibration. Which is limiting the max output power based on the fact that the new controller trust only outputs to 1860. I don’t see the logic. So I changed mot_pwm_max from 0 (0 matches rc_3 calibration) to 2000. But that hasn’t seemed to enable higher rc_out for the motors. There’s a lot more power in those motors.
The PWM from your transmitter goes through a few transformations. It works like this (my understanding):
-
Arducopter expects a PWM input from your transmitter. The range is determined by RC3_MIN and RC3_MAX. These ranges are set by RC calibration. PWM values outside of this range are clamped.
-
Arducopter’s final PWM output is a range between MOT_PWM_MIN and MOT_PWM_MAX. This range doesn’t have to match the RC input, although it should if you calibrated your ESC’s with your transmitter.
-
The ESC receives PWM from the flight controller. The ESC’s are calibrated to expect some range of PWM, and it should match the MOT_PWM range.
So after you changed your transmitter PWM from 2006 to 1860, you would have lost 150 PWM on the top end because your MOT_PWM parameters were set to be equal to your RC inputs. Setting MOT_PWM_MAX to 2000 should have gained that back, although this is assuming that your ESC’s are calibrated to expect up to 2000, so that might be your next step: recalibrate or verify the calibration of your ESC’s. Ostensibly, your RC’s minimum PWM has changed as well, so it is probably worth it to just recalibrate your ESC’s and set your RC and MOT parameters to match.
I was thinking similar. I’ve never actually “calibrated” esc’s as it has always given me trouble. But matching the input range to the mot_pwm_ values makes sense to me now.
Still doesn’t resolve the issue why ardupilot is only outputting 1848 now rather than 1950 as before. Regardless of mot_pwm_max seeing which seems to have no effect. What else could be limiting the output?