Vibrations over 15 to 20 should be addressed, and vibrations up around 30 are a problem.
See in this graph the clipping events number around 10000 - that is a lot.
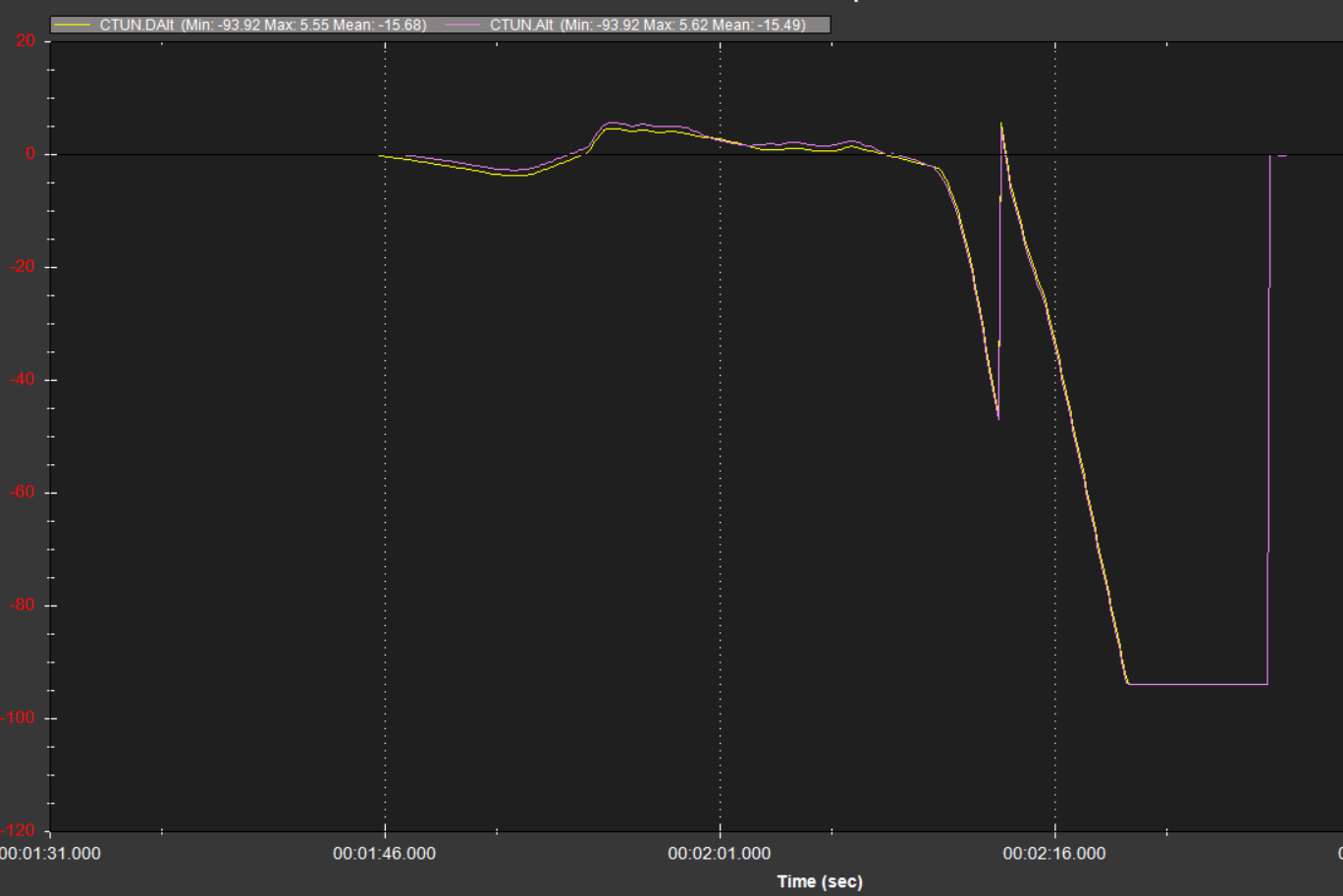
The vibrations cause the copter to think it is falling, so it increases motor output and you see it climbing, it still thinks it is falling…