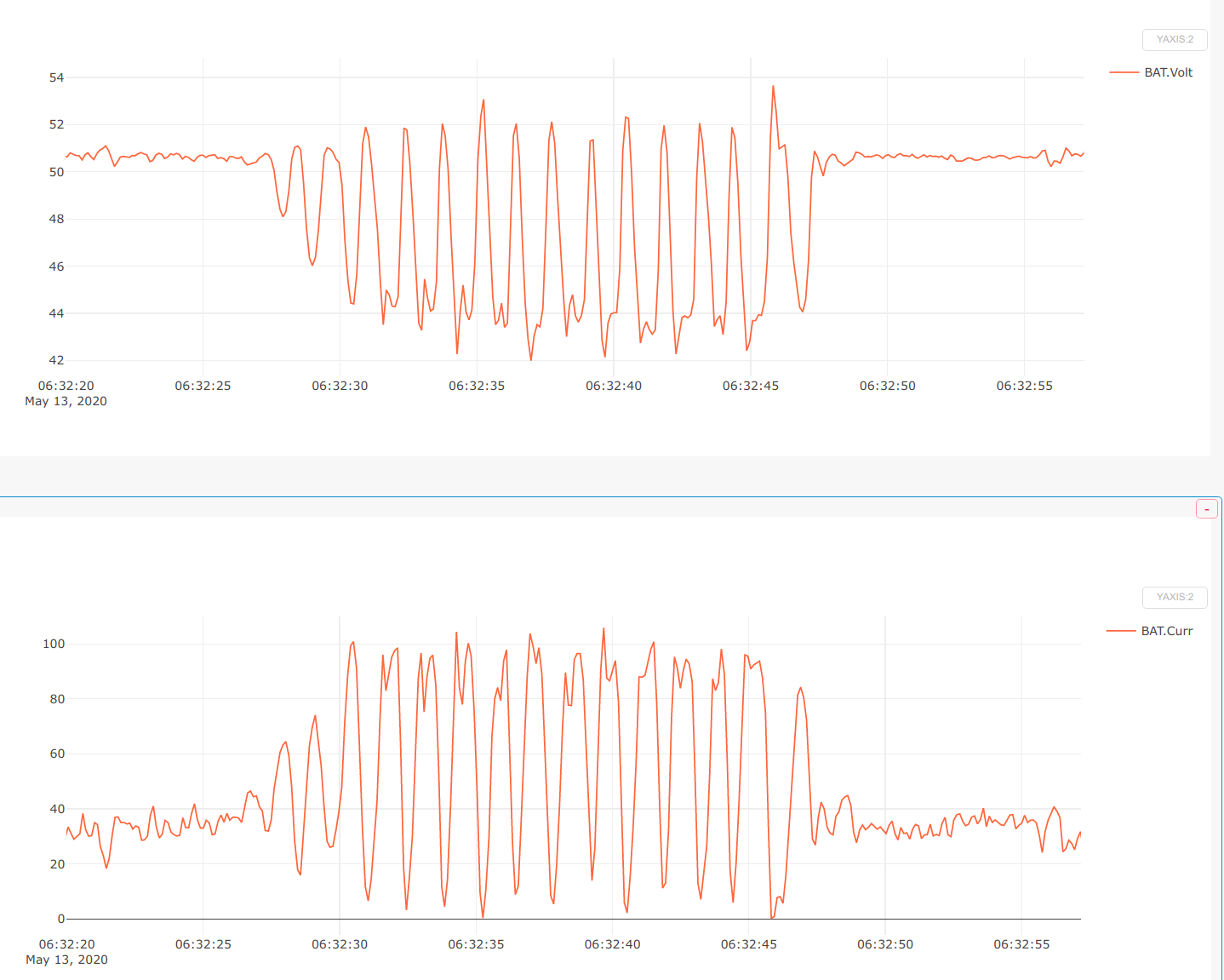
We were out flying out today when the drone started rolling left to right and vice versa uncontrolled. The pilot had no input, however we did manage to save the drone by switching out from loiter (into Auto accidentally, but we switched to loiter after and landed fine). After checking the drone over, we took off again and flew for another 30 mins or so without issue.
I’ve had a look through the logs but I can’t seem to find an obvious explanation for the cause. I would appreciate if anyone had any thoughts on this.
The drone frame is a Gryphon X8, running a pixhawk cube black. Motors are T-Motor u8 lite 100KV, props are T-Motor 29.2 x 9.5. It was slightly windy today (10-12mph winds occasionally).
Thank you for your reply!
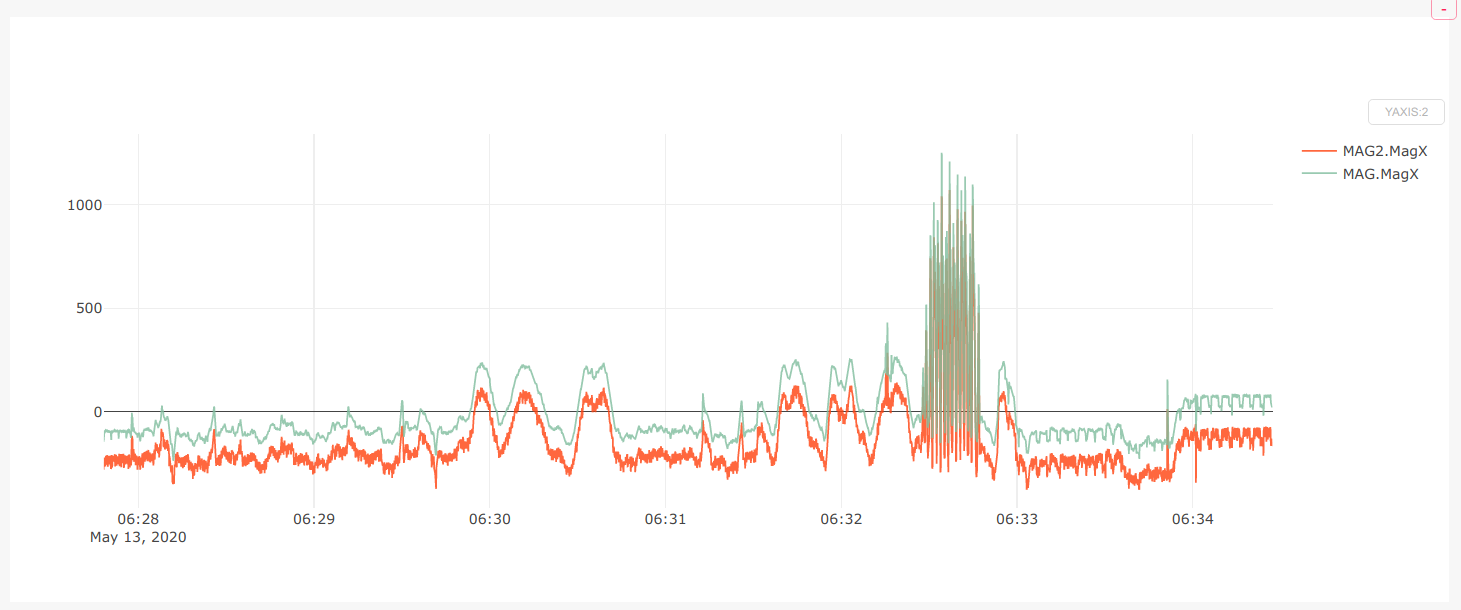
It’s very strange, GPS and baro seem fine. No strange spikes which could’ve thrown off the FC. And we managed to stabilise it by changing flight modes.
I’ve disabled the 2 internal compasses on the cube and I’m using an external compass on the Here2 GPS which is mounted clear of the frame. Am I correct in saying the internal compass variation is expected as the large current fluctuations would cause the changing magnetic field?