My Align 450 flybar is running Copter V4.0.5 on Pixhack 2.8.4. During flight test on Pos Hold, the heli suddenly lost power and descended to ground with slight damage.
Recently I am testing the Pos Hold / Loiter mode in which the heli does not hold in position tightly, but drifts a little bit. RTL also did not perform satisfactorily. This sudden loss of power has happened for the third time.
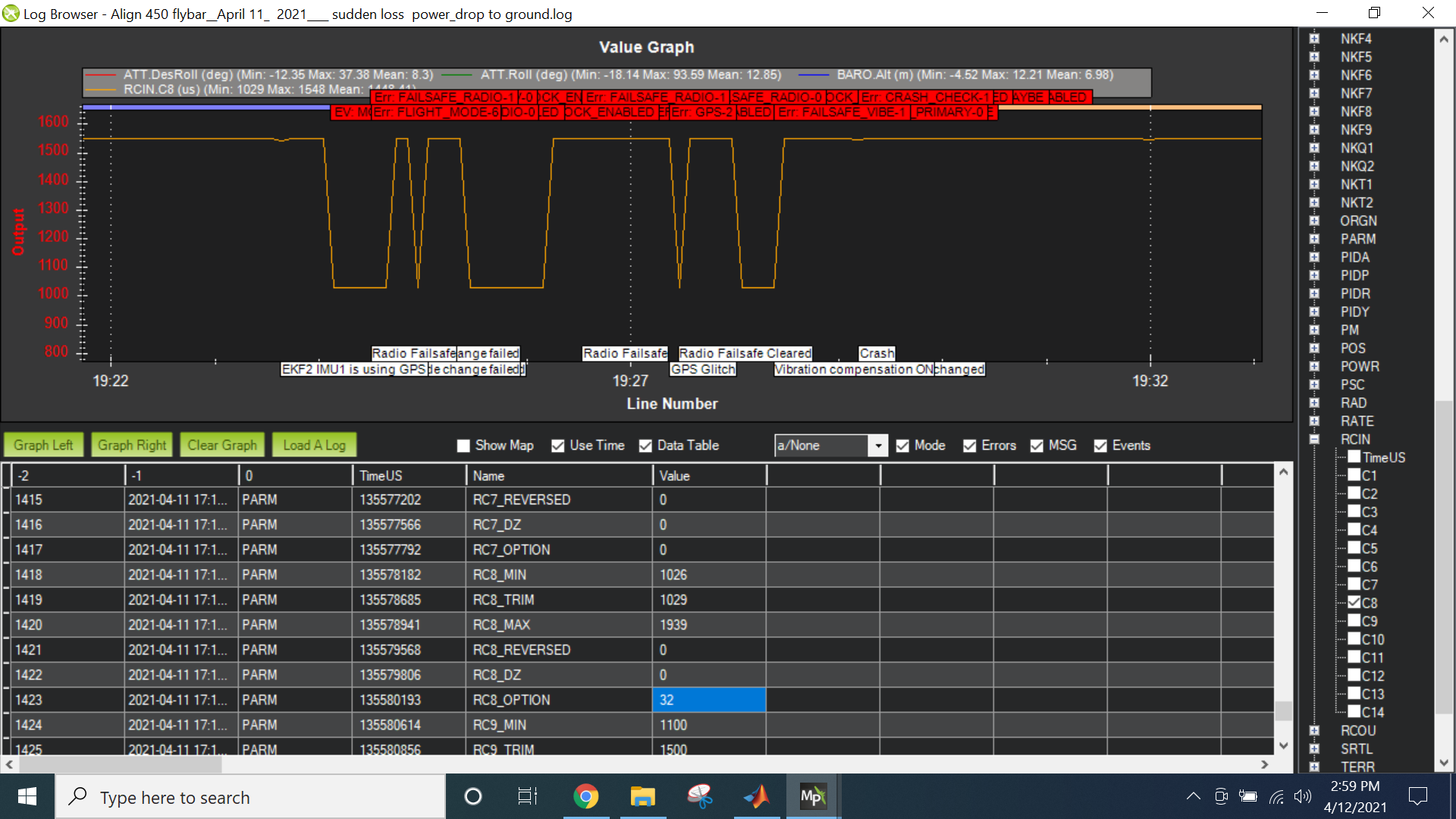
Please help to review the attached log to trouble shoot the cause. Parameters are also attached for reference.
Frankie,
Sorry to hear of your in flight power loss. So I couldn’t access your files because I needed permission.
The most common cause of power loss in the loiter and poshold flight modes is not setting H_COL_MID correctly. And it is not that the vehicle loses power, it actually disarms in flight and shuts down the motor. So that would be the first thing you should look at. Read in the wiki for the proper way to set H_COL_MID. It should be set to a value that gives a collective blade pitch of zero deg (zero thrust).
It is also reporting a radio failsafe which means the connection with the transmitter was lost. I see in your parameters that you are using H_RSC_MODE = 1 which is passthrough. This is a bad setting for this very reason. You didn’t set your failsafe values in your receiver properly so when the receiver lost transmitter connectivity, it set RC8 to 1000. You really should be using H_RSC_MODE =2 for an electric heli and 3 or 4 if you have a piston heli. These RSC_MODE settings protect your heli from radio failsafe issues. If there is a radio failsafe, it keeps the motor running and returns and lands on its own.
Please let me know if you have any questions.
V/R,
Bill
Thank you for your
quick response. I have given permission to share the 2 links.
If you can access the
files, you can see that the H_COL settings are as follows :–
H-COL_Max 1420
H_COL_Mid 1230
H_COL_Min 1180
At these setting, the
collective pitches are as follows :–
Max stick 10°
Mid
stick (Tx monitor 0%) 6°
Min
stick -2°
Wiki
asks us to set the H_COL_Mid so collective pitch produces zero thrust
( 0° for my symmetrical blades). Does the wiki imply the stick is at
mid position when measuring the collective pitch ?
No, you have to use the H_SV_MAN parameter and use the setting that puts the servo at the MID position which is not the stick mid position. That should be described in the wiki.
It was not the H_COL_MID setting that caused your problem. But you should verify that it is set correctly.
Thank you for your help. I am aware the sudden loss of power was caused by cut off of my Tx with Rx (reason to be investigated), and if the H_RSC_Mode was set correctly, the power loss can be avoided. Failsafe has to be set up in the Rx as well.