After having correctly performed the autotuning, and correcting the values according to https://ardupilot.org/copter/docs/autotune.html to obtain a less aggressive response, I have the problem that with the payload of this quadcopter after remaining stable in Loiter, destabilizes without even giving it any order in pitch or roll.
I have ruled out that the flight controller is defective by installing a new one, the chassis is rigid enough, in fact it is the second drone with it and the first one flies perfectly.
I have observed testing each of the 4 Hobbywing X9 motors on a test bench that they all have a slight vibration at 1430 PWM, and this should be filtered by the FFT that is also activated. However, it is strange that it destabilizes after a few seconds in hover.
I have been testing with 4.4.0, 4.4.3 and 4.4.4 firware versions.
Please, if someone can review this log and comment on what is incorrect it would be of great help to me.
Flash to V4.4.4 and stay there. Until V4.5 is stable anyway. The tune is very poor with low ATC_ANG pitch/roll indicative of an Autotune aggression <.075. The vibration levels are very high with clipping. You have to hammer a CubeOrange+ pretty hard to clip. Can’t check the Notch filter you have batch logging disabled.
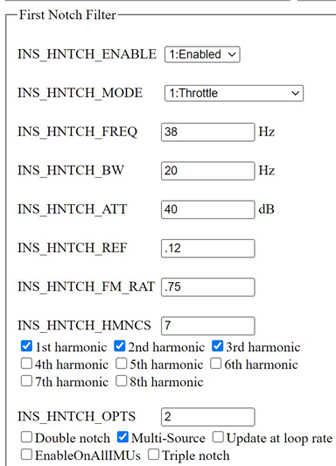
Yes, unless the base vibration levels are too high. Remove the payload and run Auto Tune again with an aggression of 0.075 (never go below this). This assumes the notch filter is set correctly. You may want to just use a throttle based notch rather than FFT.
The payload was removed and it flew again. In theory the result should be the same as flight 2, since no parameters were changed, however strong vibrations were observed again.