Hello,
frankly it’s ArduPlane, not ArduCopter, but this is purely a quadcopter question, so sorry if this really does not belong here.
The problem:
The quad hovered in the air and then suddenly it just flipped over its left side.
(Maybe it did not flip, but it was enough to fall down to earth and then flip).
I assume the quad has a multitude of problems and I would be really glad if someone would take a look at the log.
My naive analysis:
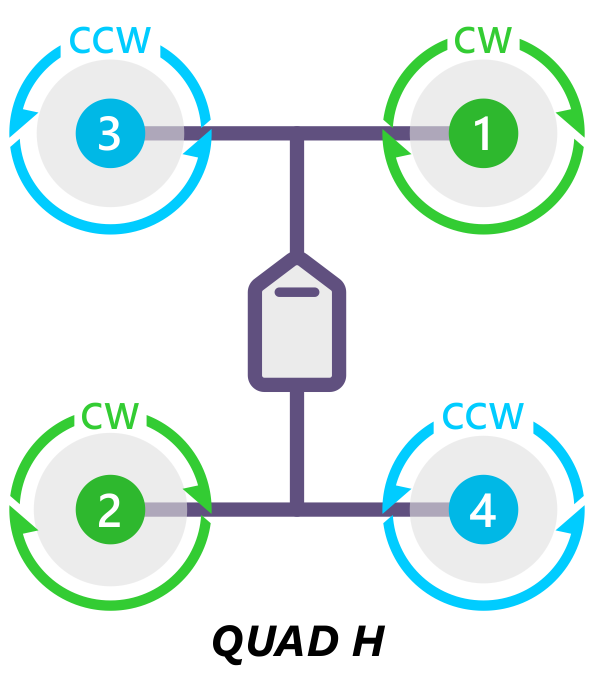
The right front motor reduced power, while the left rear motor saturated its power. This signalizes that the quad does not intend to flip itself but cannot really help itself.
So an electromechanical problem?
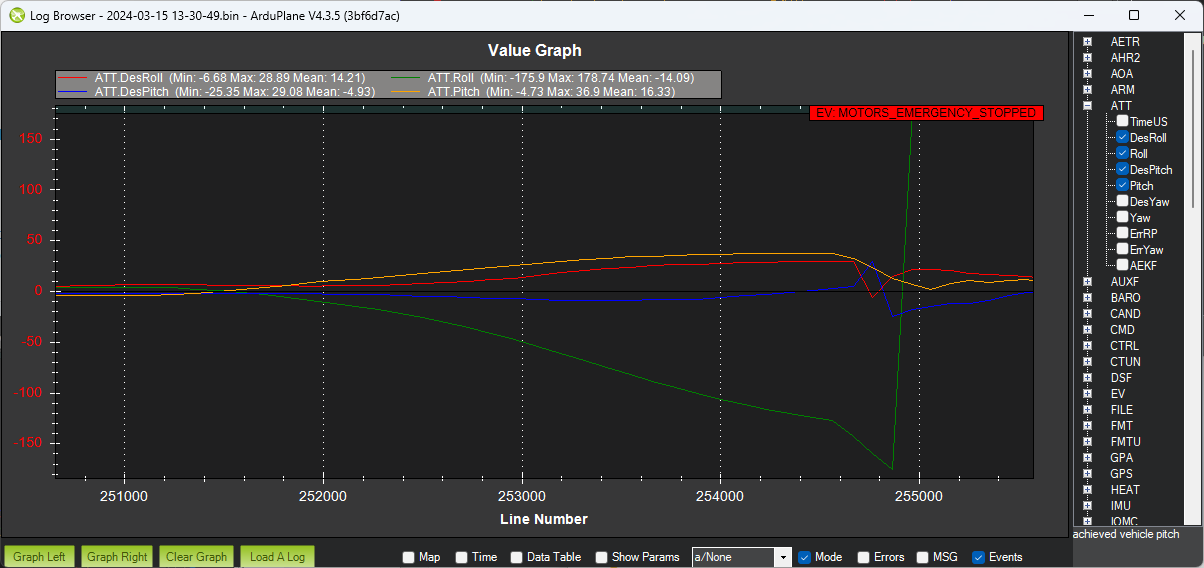
Pitch and Roll are mostly opposite of the desired Pitch and Roll, which is probably expected during an unexpected roll.
There is also a possibility that I reduced the PID so much, that the drone just cannot sustain itself in the air. But I did not do any abrupt moves and it was mostly calm weather.
Also, one of the major changes is that the power consumption of the motors can reach up to 15k instead of the original 5k. I have reflected this change only in the P&I in the roll and pitch and a little bit of D in the roll since the “upgrade”. This upgrade was made in 3 out of 4 motors, so there is a discrepancy in the motor output.
So this category is really for Copter-4.5.0 testing and, as you’ve said this log is from a QuadPlane running 4.3.5 so not the correct category for this report, still, it looks like the quadcopter-ish motors are on servo outputs1,2,3 and 4. and we see that motor2 goes high so it could be the problem motor.
The attitude message also shows that the desired and actual roll and pitch angles don’t match. In particular the vehicle rolls left (negative roll) and pitches back (positive pitch)
Re tuning you might want to run the VTOL QuikTune script but there are many things you might need to setup before doing that (listed on that wiki page).

{kind=link}