We built a custom quadcopter H frame, nearly 1.4m x 2.8m in size. We did 3 tests in stabilize mode which went successful. After some updates on wiring and some gain tuning, we did another test flight which resulted in a sudden flip and crash.
Board: Pixhawk 6c
Firmware: ArduCopter 4.3.5 - Quadcopter H frame
Empty weight: 70 kg
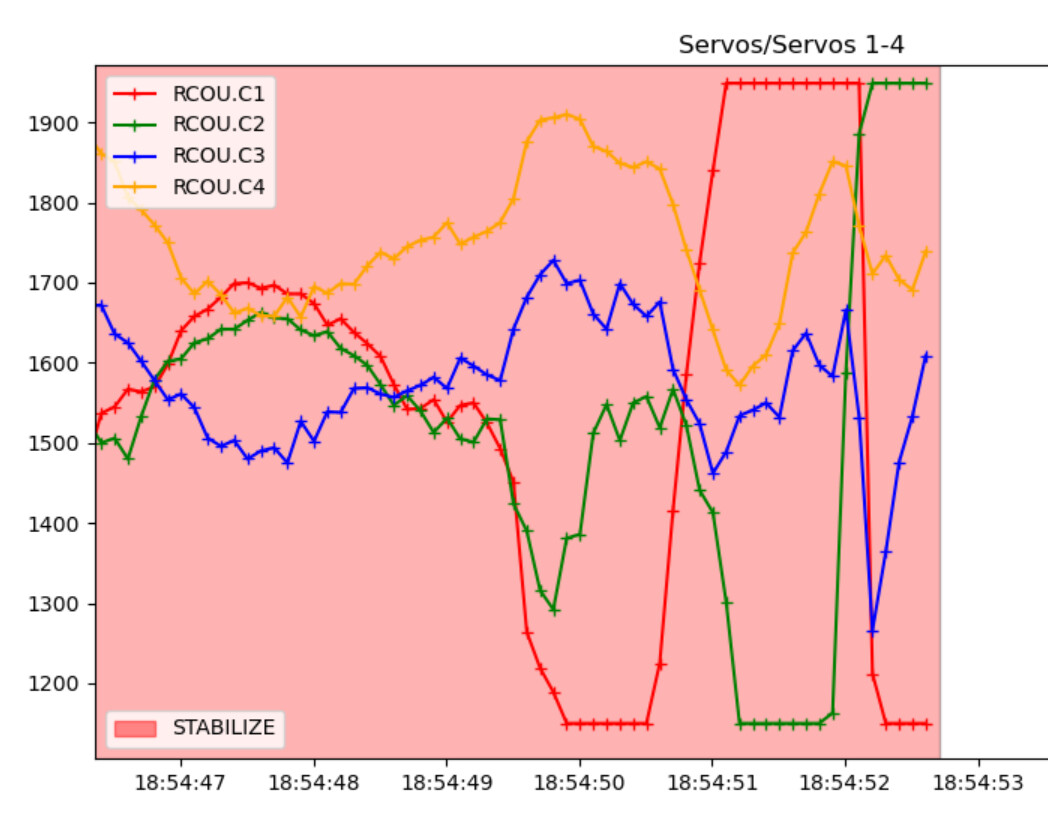
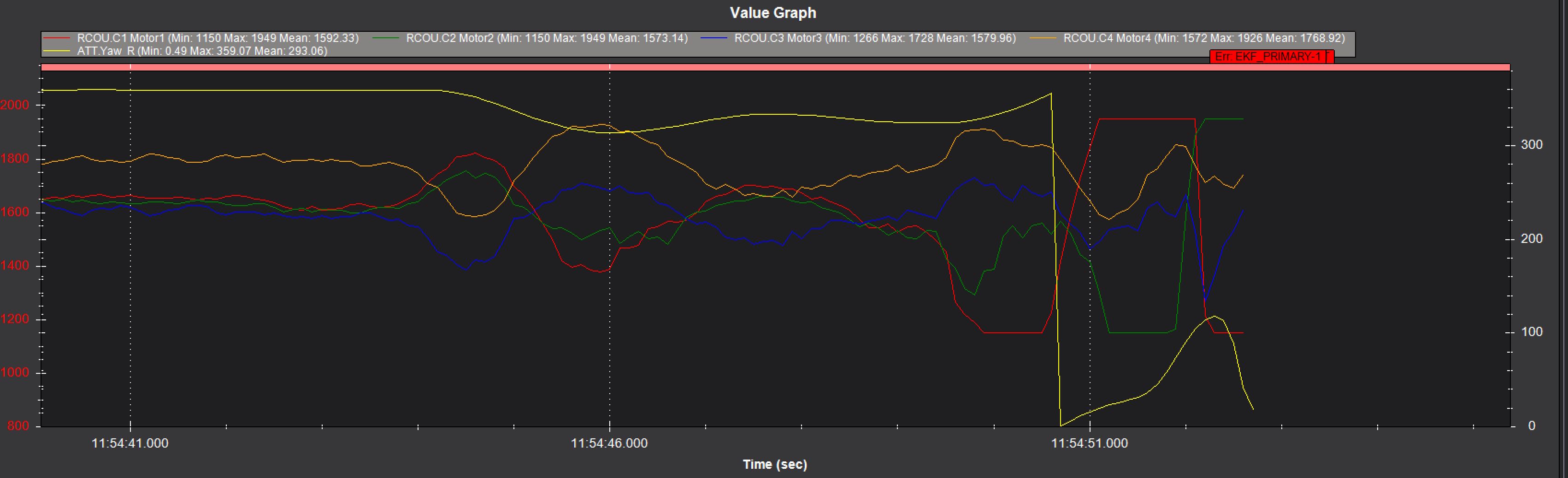
We are suspecting a motor loss (we had a “Possible thrust loss (4)” warning in another attempt 5 minutes before this flight). Both CW turning rotor are hitting the limits. But we don’t see any error messages regarding this issue in the logs.
Could you please help us troubleshooting this issue? We had changed the yaw gains just before this flight, and we experienced this crash after a yaw input, is this causing the issue? Or is it more likely mechanical/electrical? Up until that point, we were flying fine.
Thank you for your reply. We are trying to implement battery loggging.
Our hover thrust is about 50%, I didn’t think it would be underpowered. Maybe we should have put tighter rate and attitude change limits before, so that the controller could handle those requests without hitting the limits.
On default parameters, which ones do you think we should change? We did our first flight with mostly default parameters, then in the second flight we changed some parameters according to this link: Setting the Aircraft Up for Tuning — Copter documentation but it resulted in very noisy data and harder to control vehicle so we reverted them. Do you suggest going with them and doing gain tuning based on it? What else we should change?
The same ones that everyone needs to change. In Mission Planner, Setup>Mandatory Hardware>Initial Tune Parameters. That’s the pre-1st flight starting point and configuration and tuning proceeds from there. Then you make a simple Hover flight in Alt Hold and review the log for Motor outputs oscillation and the data you need to configure the Notch Filter.
With regards to thrust/weight; if it was 2:1 then the average motor output would be close to 1500µs. This looks closer to 1700µs.
Thanks again for your input. For the next flight, we’ll make sure to enter the ones you mentioned more carefully. I believe we also had a problem with motor 4 on this flight, since it is giving significantly more PWM output to that motor throughout the flight.
Thank you for your warning, this is an important point. I am thinking of setting more conservative rate and attitude change limits to the flight controller, I think it would be safer considering the large and underpowered aircraft, and we don’t need that much maneuverability at this point anyway. If it doesn’t solve the altitude drop problem, I’m going to modify the code as you suggested.
We are building a manned eVTOL ultralight, and this is our first prototype. We are doing unmanned tests right now of course. We have a long way ahead, and this is our first crash It is a little sad but these things happen in aviation, we are still very excited about our next tests.
as @Turf1975 implied, people here won’t support someone building a manned aircraft. People will use it anyways for manned aircraft (in “secret”), but it is not widely known that ArduCopter suddenly drops for high attitude control output if the T/W is less than 2. Unfortunately, manned aircraft (from various eVTOL companies, for example Opener) very often have T/W < 2 !! Because at that size, thrust margin is harder to come by than with small toys.
I just hope that someone does not get killed using ArduCopter without knowing that the aircraft can suddenly drop under certain conditions (that are avoidable with code modifications).
Thank you for the warning. This is just a prototype and we do not intend to use this with manned applications. After months of testing and gaining experience, we will build a second prototype which will have a dummy mannequin inside.
Before manned flight, we will implement another flight controller with triple redundancy and other safety features.
I hope this sounds OK. Of course we do not want anyone to get hurt in this process.
Yes I agree some of those manned copters would have T:W of less than 2, and I know of at least one where the pilot specifically says it’s over 2 (in a video)
And apart from general safety, you can bet they ONLY fly in VERY specific, calm conditions. They certainly do not appear to do any radical maneuvers like are common with an unmanned copter.
Empty weight is 348 lbs. Max static thrust is 960 lbs. A 200 lb pilot would mean a T/W of 960 / (200+348) = 1.75. To get a T/W of 2, the pilot would have to weigh 132 lbs. Of course the T/W is 2.76 for unmanned operation…