I have built a 5-inch ArduCopter with a matek h743-slim v3 FC, and matek M8Q GNSS unit, and a skystars 60A ESC attached to 4 iFlight X-ing 2207 2450kv motors.
Everything seemed fine on the ground. Picking up satellites, did the ESC calibration and compass calibration, radio setup, all fine. I go for my first flight test, and
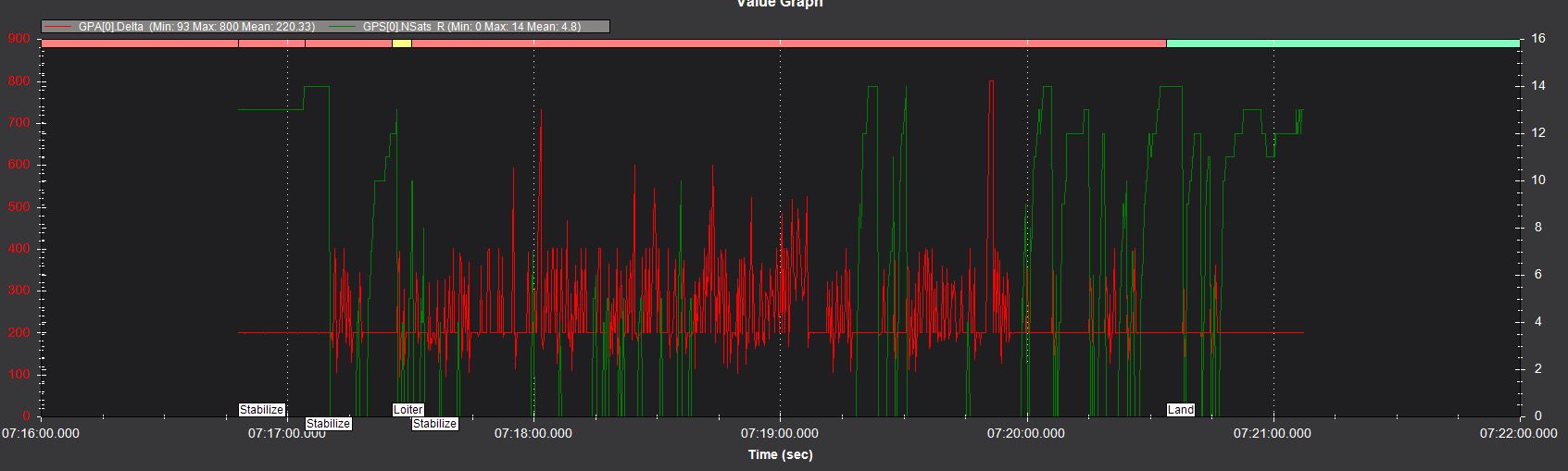
as soon as throttle is over ~30% I get some serious wobbling/vibrating, source unknown. Shrugging my shoulders, I go further outside town to do some more testing. But when I do, soon after taking off I get a GPS glitch and lose all satellites and now Loiter mode does not work for example.
This needs to be fixed before proceeding with anything else. To start:
Drop the Rate Pitch/Roll P&I in half.
Set INS_ACCEL_FILTER to 10Hz
Using Motor Test to set MOT_SPIN_ARM and MOT_SPIN_MIN appropriately Setting Motor Range
Set these:
PSC_ACCZ_I,.35
PSC_ACCZ_P,0.175
INS_LOG_BAT_MASK,1
Then make a simple hover flight in AltHold for a minute or so and post that log. You need to configure the Dynamic Notch filter.
The GPS signal is intermittent. Perhaps interference from the Pi camera. Disconnect it and try again.
Thank you for your reply and help, I will begin implementing that and likely report back tomorrow latest. Quick question before I get started though, why would the picamera interfere with the GPS do you think?
I’ve set all those parameters as you said. Points I’ve noticed:
The minimum I can set PSC_ACCZ_P to is 0.201. I have done this.
MOT_SPIN_ARM was previously 0.06 and MOT_SPIN_MIN was previously 0.05. I should have properly done the motor test on initial setup. Don’t know what this could have caused though.
I don’t know how to select ESC firmware in mission planner/arducopter, I am looking into this
Since it is night time here I will do the test flight tomorrow and post logs, fingers crossed. I will try once with picamera connected and once with it disconnected (but still physically mounted).
EDIT - correction, it is this ESC. It is indeed BLHeli32. I have found parameter SERVO_DSHOT_ESC that when set to 1 sets the DShot output to BLHeli32, I guess this is what I need…
Ignore that and set it to what I suggested. After hitting YES to the Nanny warning hit Write Parameters again to save it.
What you actually need is the Bdshot firmware version for that Flight Controller. Download the .apj file from here and use Mission Planners “load custom firmware” feature to flash it: Matek H743 Bdshot
Then follow the Wiki here to set the appropriate parameters: Bdshot
MIN needs to be higher than ARM as the Wiki will tell you. You have them at default now which is far from right. MIN too high will cause the outputs to bounce off the bottom as seen in the above graph.
All done. Thank you again for your help; yes I realised the issue with the ARM and MIN values as soon as I saw that. I will have to wait to do my test flight until tomorrow but like I said, I will eagerly report back. If it crashes and smashes I will post pics…
Here we are. Vibration seemed a little better this time around, but it was still there.
Flight 1: New Motor guards attached but shook loose part way through. Probably didn’t help.
Flight 2: Motor guards screwed on more tightly. Still well attached (as were motors obviously) at end of flight.
Motors did get very hot I noticed. Don’t think there is friction between them and the motor guards but they are quite close. I will remove the motor guards for the next flight.
I think you should reduce the Rate Pitch/Roll P&I in half as I suggested. Looks like you reduced 1 of the 4 of these parameters. And you only reduced one of the D terms. Not a bad idea but reduce Roll also.
So, not much progress to report as the outputs are still oscillating. This combination has made it worse:
ATC_RAT_PIT_I,0.0675
ATC_RAT_PIT_P,0.135 (hint-make P=I)
Get rid of the prop guards make these changes and try again.
I did what you said above here and just had a, by comparison, beautiful little test flight in the garden. The endurance was also much better and the motors did not get burning hot. I will now refer to you as the quad god.
I can now move onto the GPS problem since it still keeps dropping all sats shortly after takeoff. Thank you so much.
Output oscillation gone. So you are really only at a pre-tune condition with plenty left to do but its looking good. Sure, troubleshoot the GPS issue but you may as well run these in parallel. Make these changes:
INS_LOG_BAT_OPT,4
MOT_PWM TYPE,6
SCHED_LOOP_RATE,800
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,15
SERVO_DSHOT_ESC,1
SERVO_DSHOT_RATE,2
PSC_ACCZ_I,0.30
PSC_ACCZ_P,0.150
Then these at the same time:
INS_HNTCH_ENABLE,1 (Then refresh parameters to see the next ones)
INS_HNTCH_ATT,40
INS_HNTCH_BW,40
INS_HNTCH_FREQ,80
INS_HNTCH_HMNCS,1
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,6
INS_HNTCH_REF,1
Then do another AltHold Hover flight and post the log.
Note: Your vibe levels are high which will come back to haunt you later as you work thru tuning. It will fly like this obviously but if you can add a softer mount it will help.