I am having trouble performing an auto-tune and have a couple theories that I am hoping yall can help with.
Also, I have been reading and working with the wiki doc and been trying to knock out everything in order, but find myself jumping around. Is that bad, should I be going in the order it is laid out in or is it okay to jump around?
In any case I have passed the acceleramator and compass calibration, but when I try auto-tune in the roll axis, i get a “auto-tune fail, cant level” error in mission planner. I have auto-trimmed and have enabled one harmonic notch filter, plus manually tuned the PID rate, mostly in the roll axis, via channel 6, so the craft is flying pretty decent i.e. no oscillations and hovering decent in stab mode.
This is why I am confused as to why the auto-tune is failing. My theory is that the compass/gps module could be better. I am using a M7, but I see that there are much better ones available e.g. Holybro M9N, so I am thinking on upgrading.
My immediate goal is to perform successsful precision lands i.e. travel some distance autonomously, detect an ArUco marker, and land on it within some minimal range.
My frame is a F450 with readyToSky 2212-920 kv motors, 1045 props, and a 3s 3000 mah lipo, which only allows approx 10 min flight. Any suggestions on battery or harware to get more flight time is greatly needed and welcomed.
I have all of that connected to a pixhawk 2.4.8 flight controller and a RPi 4 combo. I also have a RPi camv2 and Leddar One range finder on the under carriage of the craft.
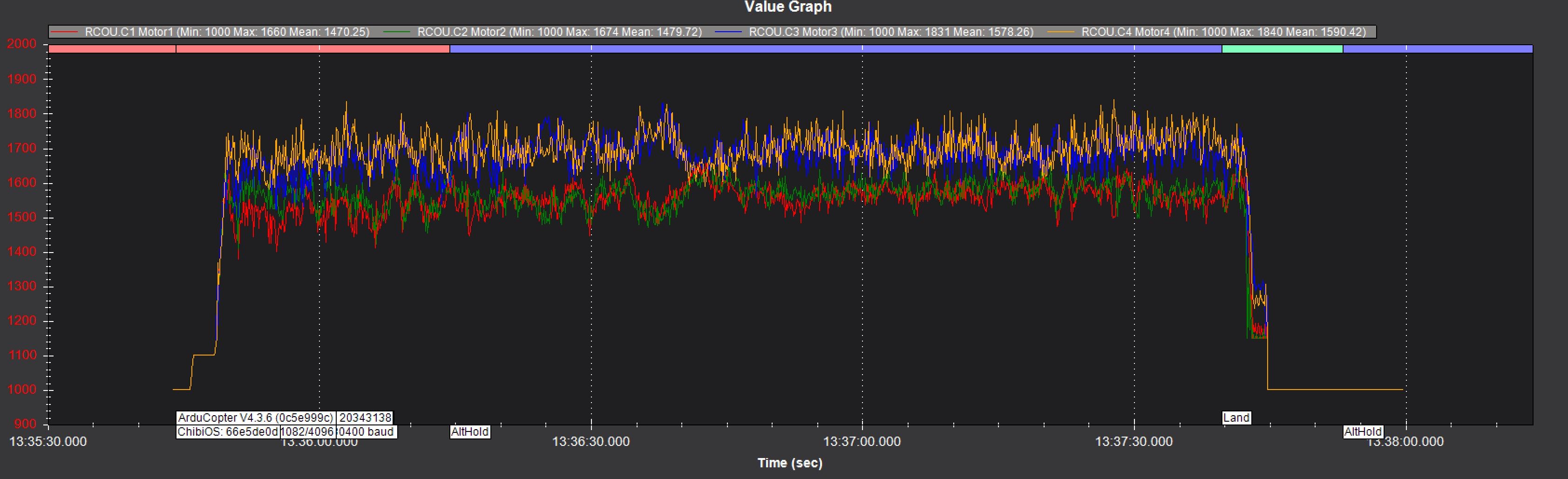
Here, is a doc with several flight logs from last month (May 2023). I am a begginer, so I still get tripped up looking at the logs, but I definetly want to learn. If someone could please help me read the logs so I can get a good tune on this craft I would be very grateful!