Hello everyone,
I use a slightly customized version of 4.0.5 (we will be upgrading soon). ArduCopter has been great to us, however I have hit a snag.
For some reason I have been struggling to set this up successfully. I have read all the posts even remotely related to this but I still cannot get it to work.
This is what I have done so far:
- Set up LW20 rangefinder on i2c. the rangefinder works and maintains altitude in manual modes like Loiter, AltHold, etc
- EK2_ALT_SOURCE = 0
- EK2_RNG_USE_HGT = -1
- TERRAIN_ENABLE = 0
- TERRAIN_FOLLOW = 0
- WPNAV_RFND_USE = 1
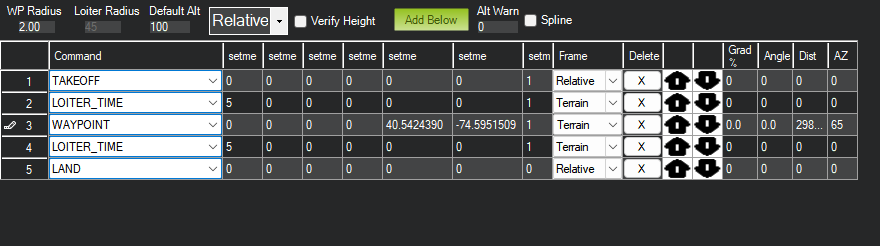
When I planned my missions and used relative altitude - changes in rangefinder readings did nothing to target alt
When I planned using terrain frame for altitude - it terrain failsafed (Terrain data missing)
I am attaching a log as well
log w terrain frame - https://drive.google.com/file/d/1YIbJnTtU7pMd3i_9K27ADQMrRSUi1NIO/view?usp=sharing
log with relative frame - https://drive.google.com/file/d/1YK8ATj7b1lEvef7EUQBkk0R63IbV4ZaQ/view?usp=sharing
Please help! What am I missing?
Chris