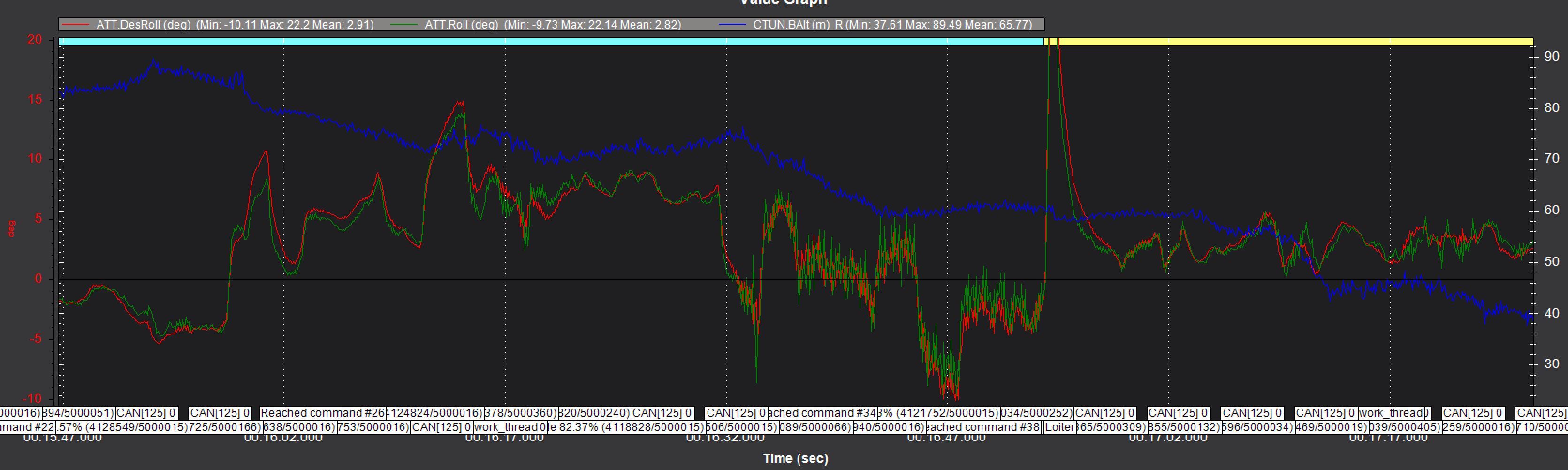
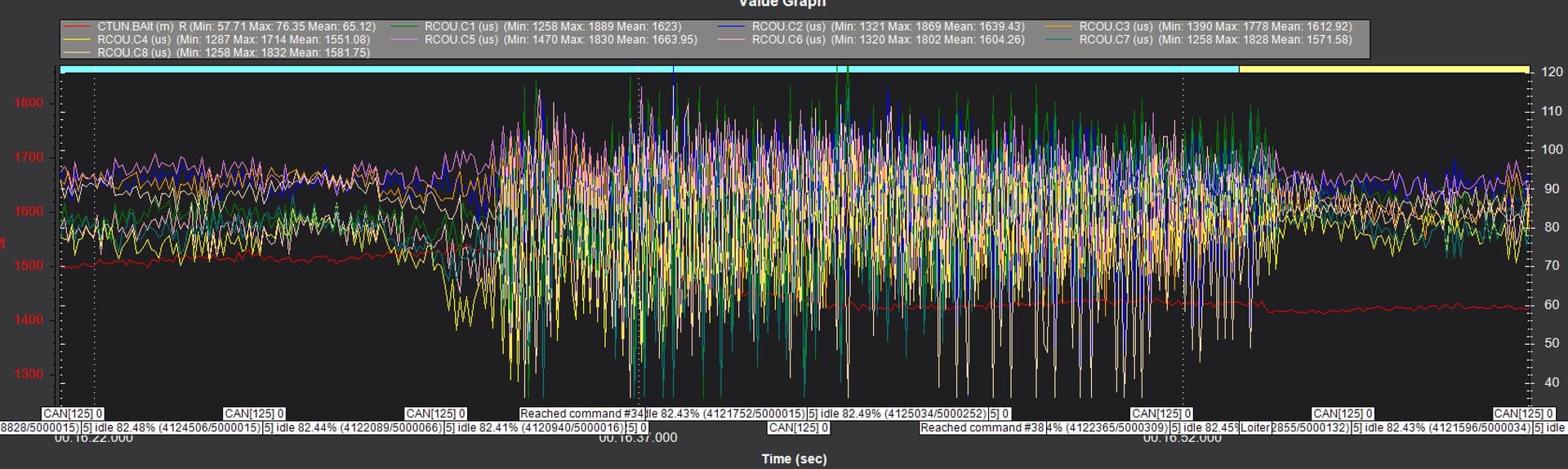
I have a problem with my copter in Auto mission mode. It is an Octoquad H configuration. The copter flew well in manual control modes (Stabilize, Altitude Hold, Loiter). However, when I switched to Auto mode to run a mission, I observed a very strong oscillation in Roll axis while the copter was following the planned path, but I’m not sure what was the reason for it. There wasn’t a strong wind during this flight.
1st set these based on MOT_THST_HOVER as per the tuning guide Tuning
PSC_ACCZ_I
PSC_ACCZ_P
Set this to 10Hz: INS_ACCEL_FILTER
You should definitely configure the Dynamic Notch filter. Start by setting this to 1 (INS_LOG_BAT_MASK) and make a short AltHold hover flight to capture the data. Post that log if you like.
Hi @dkemxr, thank you for your feedback. I will make this changes and fly again in the next days. Do you think I need to do PID tunning more? I didn’t do the autotune because it is too dangerous for big copter, I tuned it manually. Do you think I need to make some changes in PID as well?