Hi everyone,
We have a setup that includes the Pixhawk4 and the Nvidia Jetson Nano. We aim to develop a simulation on a ROS infrastructure that is operating in the Nano. To do that, we thought a possibility would be to receive state information from the pixhawk together with the control commands. Receiving state information is trivial with MavROS, yet we would like to know if there is a possibility to stream the control commands, such that we can convert them to ROS topics.
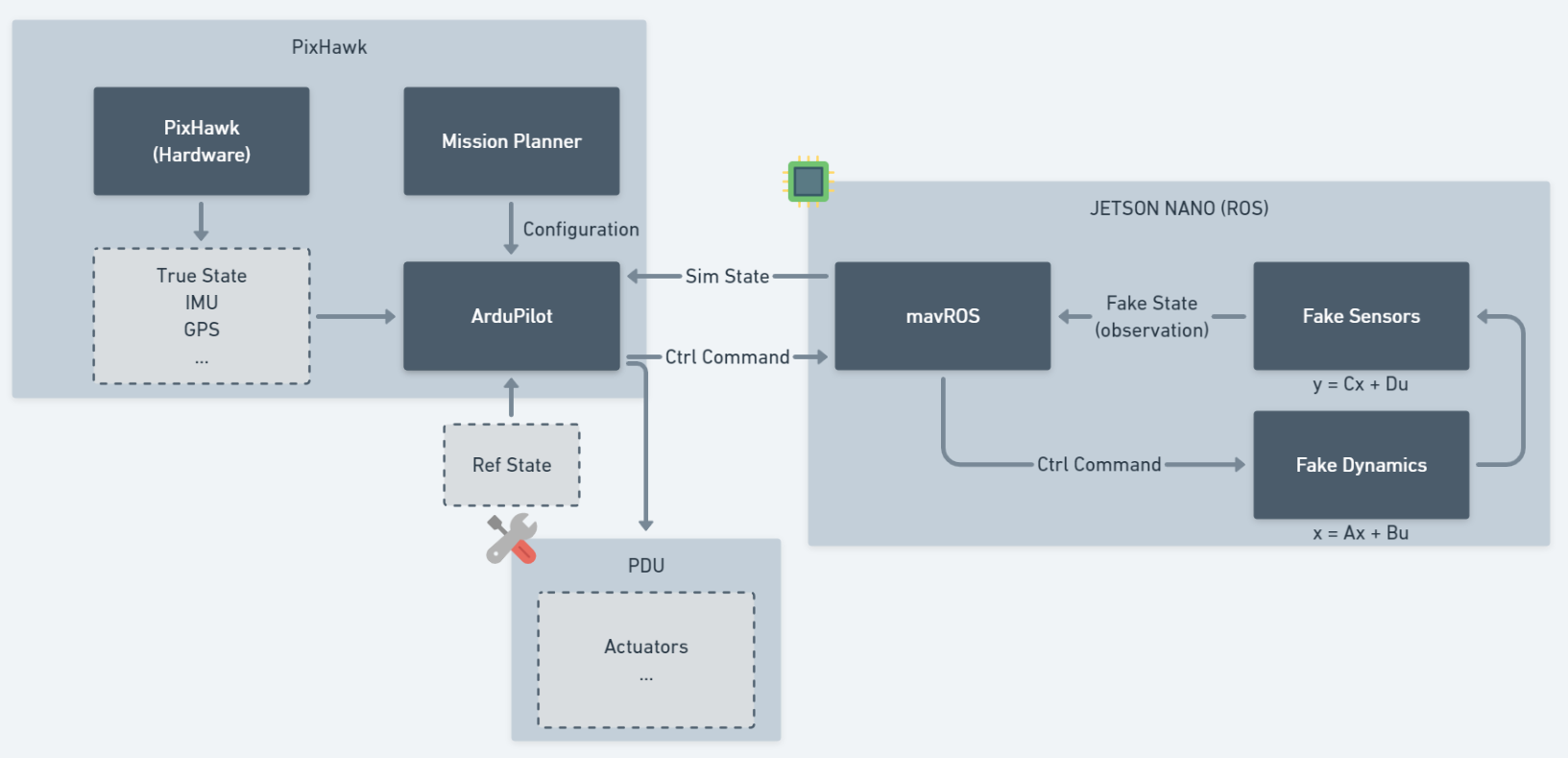
In addition, we would like to know if it is possible to overwrite the state perceived by the pixhawk with fake measurements from fake sensors broadcasting from the Nano. This is how we imagine the architecture to be:
Thanks in advance.