Hi there,
I am in the process of tuning my latest build and am seeing strange yaw behaviour that I don’t understand - looking to see if anybody has faced similar things and has an idea?
For context, it’s a very large Octo (14kg TOW, 24x7.9 Props, T-motor Flame ESCs and T-Motor 701S Motors (@12s). Roll/Pitch Performance is flawless and extremely responsive and smooth and the bird is very stable in the air - I am very pleased with it. All axis have been autotune, incuding Yaw, on a light wind day.
Yaw response to pilot input is very sluggish. It feels like “delayed response”, i.e. I move the stick halfway or more to left or right and the bird sloooowly starts to turn and picks up yaw speed gradually. But it happens so slow that I typically let go of the stick way to late because I want it to turn faster. When I do finally let go it continues turning and slooowly decreases yaw speed until it stops turning again a few secs later.
I think the following pic shows it nicely:
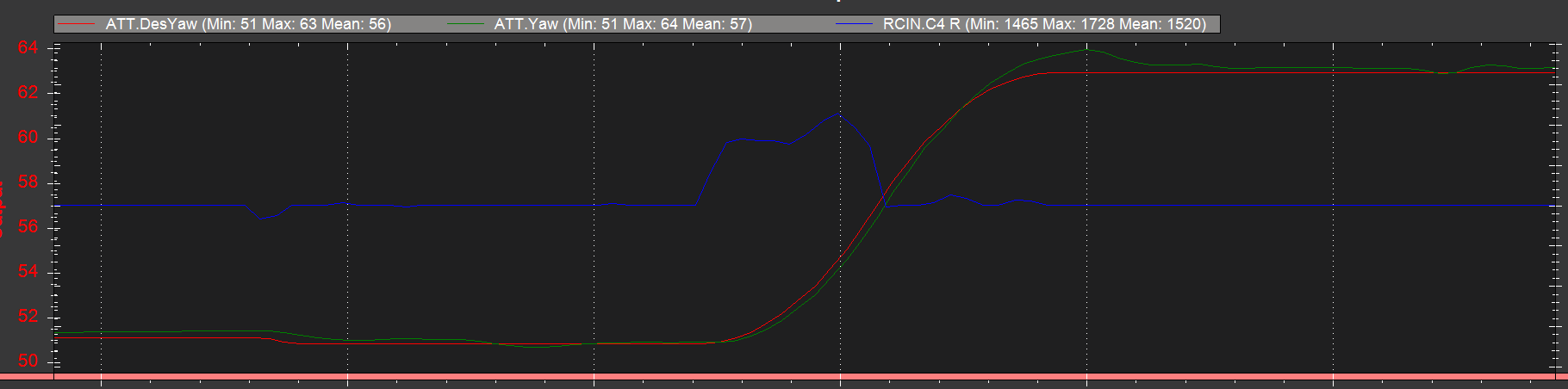
Is this simply a matter of running another Autotune on Yaw?
I’ve done a few builds (not this large) and never had such sluggish behavior 
I need this to be “snappy” on yaw too…
Log is attached…
Thanks for any helpfull comments,
Christian
2018-04-15 17-06-07.bin (1012 KB)