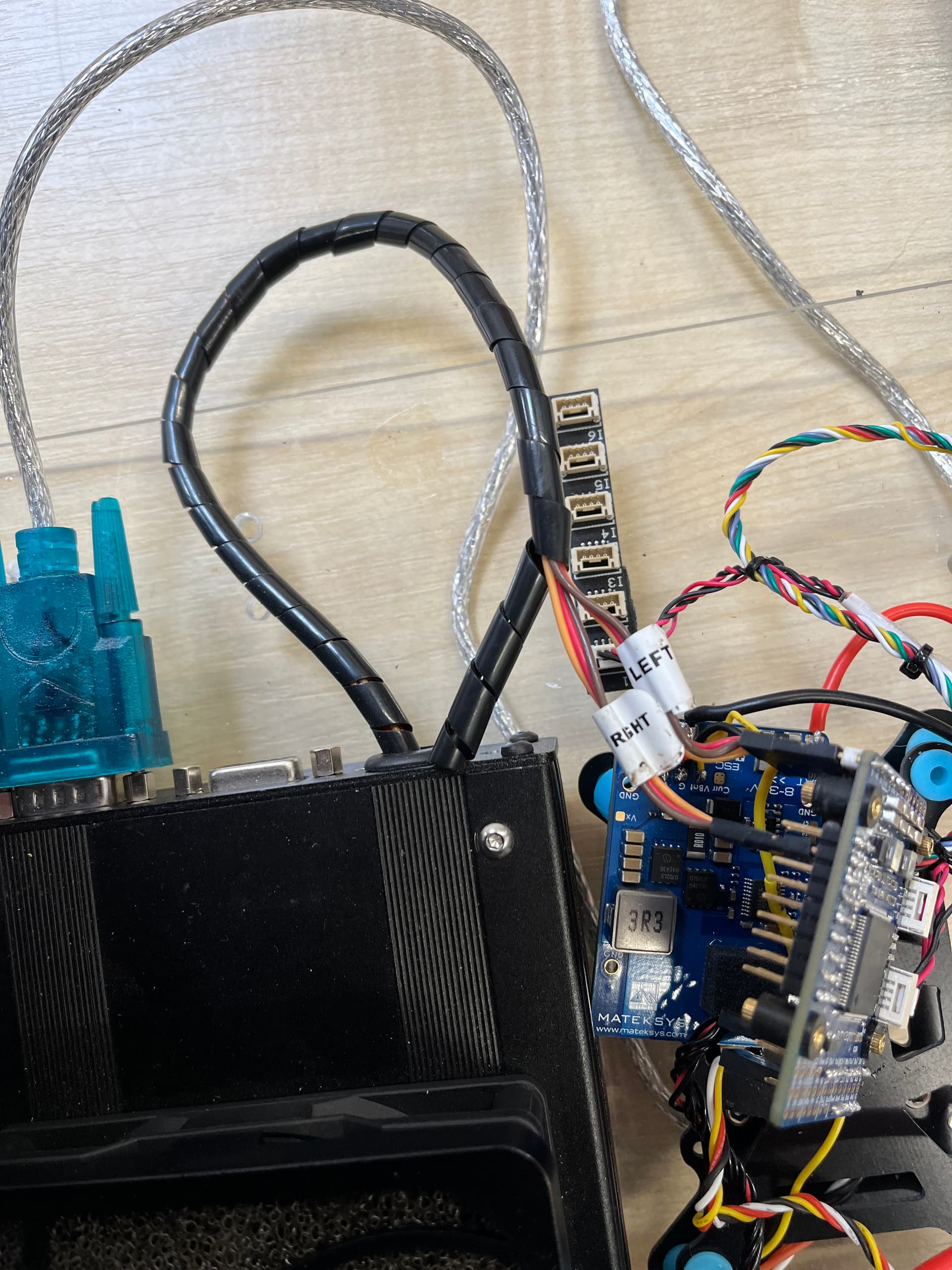
I have peeled back the spiral wrap to show the only labeling. Left and Right.
Left goes to Servo Pin 1, Right goes to Servo Pin 3
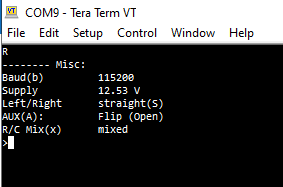
I finally managed to grab this screen shot which I think shows mixing is enabled.
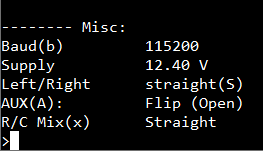
I have now managed to change it after sending @0sx0
Now I have to try and save it!
Thanks @Yuri_Rage for helping get this far.
Update so far:
After setting the speed controller to mixing disabled I am getting a better response.
On the bench forward and reverse are working and left and right are working but only independantly.
On the ground the controls work independantly. When I go forward and put some right turn in it works as it should. When I go forward and put some left turn in it goes straight into reverse.
Any ideas?
Probably a transmitter mixing issue at this point. How is your transmitter mapped? What channels are on which sticks?
And before we go too far down that path, do motor tests C and D work properly?
I think you are right Yuri. My transmitter is all over the place at the moment. I can only arm with full throttle rather than full right.
I’ll get it back on the bench and do the motor tests and then look at the transmitter.
Many Thanks.
Ardurover documentation says:
servo1_function = 73
servo3 _function = 74
They are both shown as throttle commands.
Is channel one on the transmitter set to throttle or steering?
You are confusing inputs and outputs. Servo1 output is to the left wheels. Servo 3 is to the right. That doesn’t change regardless of how you set up your transmitter, and it’s immaterial to any RC discussion.
ArduPilot mixes RC input based on several factors and then translates that to left/right output.
As for RC input, you can set your transmitter and control scheme up in one of several ways, outlined here:
Steering Input Type and Reversing Behaviour — Rover documentation (ardupilot.org)
I tend to prefer single stick control, so on my transmitters (all of which are mode 2 and use AETR mapping) I use:
PILOT_STEER_TYPE,0
RCMAP_ROLL,1 (steering)
RCMAP_PITCH,3
RCMAP_THROTTLE,2 (throttle)
RCMAP_YAW,4
This puts throttle and steering on the right stick, which is spring centered on my transmitter.
If you wanted to keep throttle on the left stick and steering on the right:
PILOT_STEER_TYPE,0
RCMAP_ROLL,1 (steering)
RCMAP_PITCH,2
RCMAP_THROTTLE,3 (throttle)
RCMAP_YAW,4
This keeps throttle on the left stick, which should be spring centered (or manually set to neutral before arming).
Or if you wanted tank-like (“two paddles”) steering with separate left/right throttle control:
PILOT_STEER_TYPE,1
RCMAP_ROLL,3 (left throttle)
RCMAP_PITCH,1
RCMAP_THROTTLE,2 (right throttle)
RCMAP_YAW,4
This puts left throttle on the left stick and right throttle on the right stick. Recommend both be spring centered or you’ll likely have some difficulty managing control.
Again, all of that assumes that your transmitter channels and layout match mine (which is a very common layout). If you change any of these parameters, recommend a reboot before testing to ensure they are mapped properly.
I never use stick arming on Rover firmware (always using a switched RC channel, instead), so you may find that you want to swap the YAW channel around to enable single stick arming if that’s your preference. My opinion is that stick arming on Rovers is completely unnecessary and possibly even unsafe, depending on vehicle configuration.
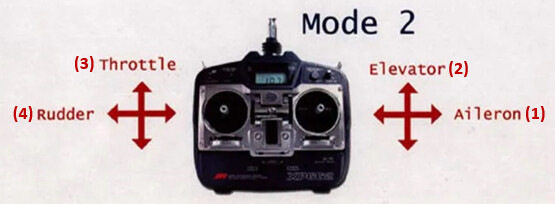
Reference image for mode 2, AETR:
That is very clear now, thank you. I have been using two sticks. I am going to try the single stick layout as I think it will be more natural.
Will take your advice and setup arming on a switch.
I am away on business next week so will not be able to do much until I am back.
Will report back once I have reconfigured the transmitter.
Thanks @Yuri_Rage for all your help.
I am pleased to let you know that it is now behaving as it should.
I’ll keep an eye on my log files if it does it again!
I’m liking the single stick!
Now have to move on to tuning.
Cheers,
Martin aka Fossil