Yesterday I was trying to set up my rover and in auto mode was completely strange.
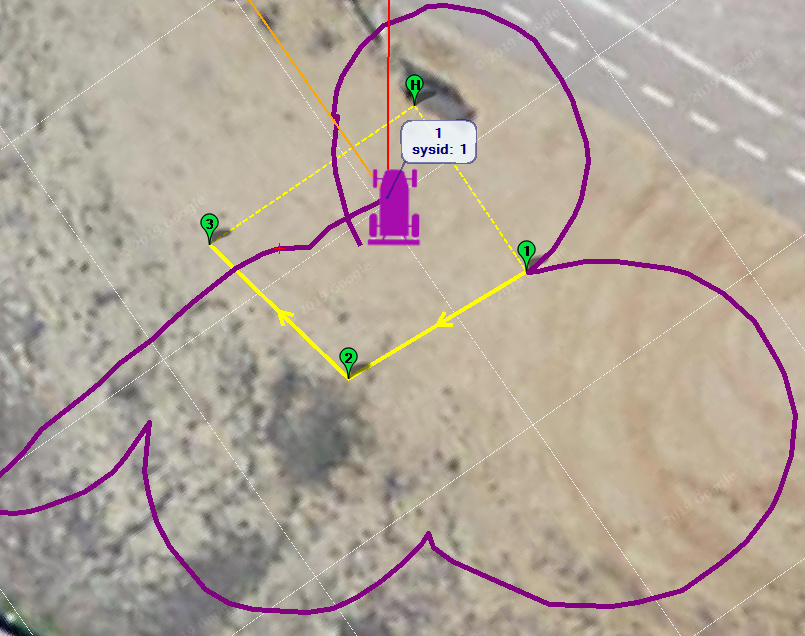
As you can see in the picture I set up a simple path, but the response of the rover was very very strange.
He started to move forward a meter, after the rover flip 180 and started to go to the waypoints reversed way and describing huge arches every for each waypoint.
I did another test yesterday and I uploaded the logs to my dropbox folder,
I received some EKF problems. I’m using Here+ and RTK antenna. I did test with and without rtk settings to isolate the error. I did the calibration again from zero and the navigation yesterday was completely a nightmare.
It looks like ARMING_CHECK = 0 which may be stopping the issue from appearing as a pre-arm check. I’d recommend turning this back on and then attempt resolve the issues that appear.
One thing is it appears the “live” compass calibration has been done instead of the “onboard” calibration. The “onboard” method does better so I think it would be good to go back and re-do this calibration.
The GPS/compass is oriented so that the arrow is pointing forward? … maybe check that when looking at the GCS map that the vehicle’s heading appears close to reality.
I wonder if you’ve tried the MP’s motor test? This is very imporant.
Finally I fixed the issues, The main problem was the sat antenna that was very near to the frame, this caused interferences that went crazy the system. Now the rover is going perfect with rtk mode and 3D mode.
I’m going to follow your advice regarding the arming check…