our Nimbus VTOL , after upgrade to 4.0.0 firmware
we turned on Qrtl, and normally when RTL was triggered,
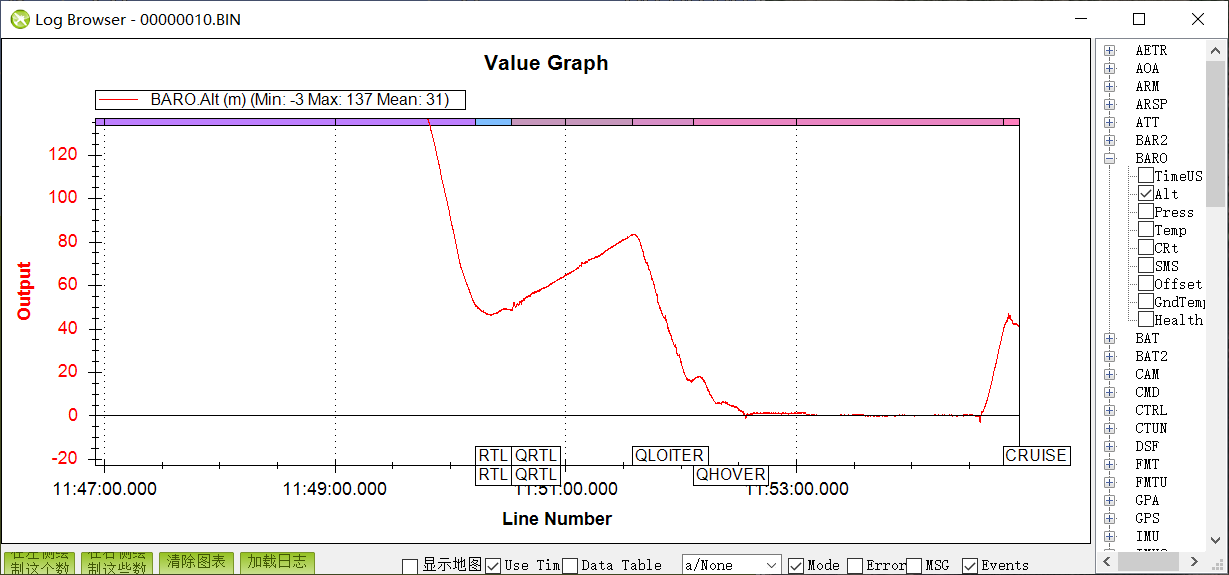
it should fly to altitude set in ALT_HOLD_RTL ,which we set it to 5000
but it actually started to climb and drift after reaching the home point
we recheck settings and didn’t find anything was changed except upgrading to 4.0.0
please help with the problem .