Hi,
another problem of my new setup orange cube + Rover4.2.
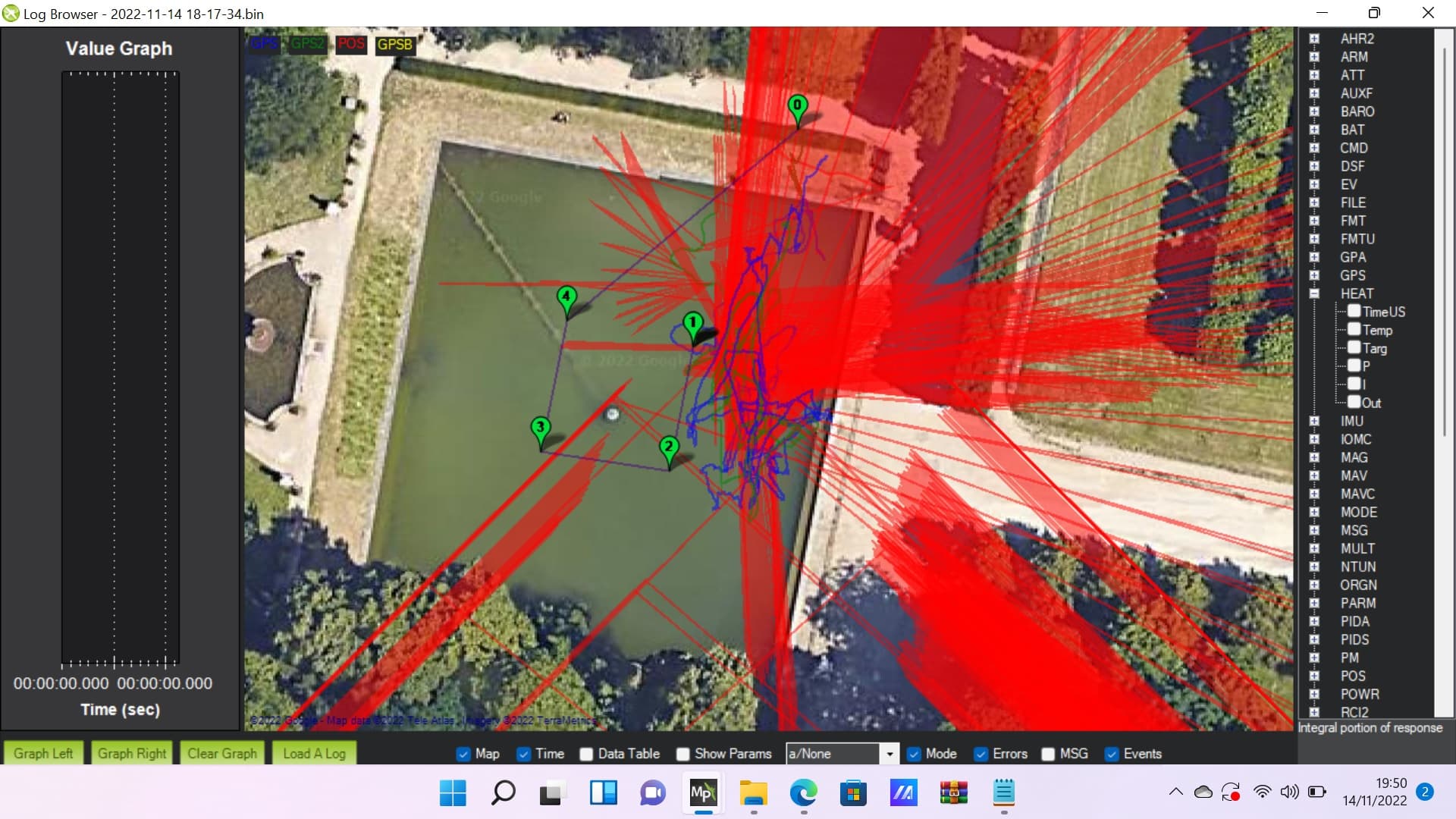
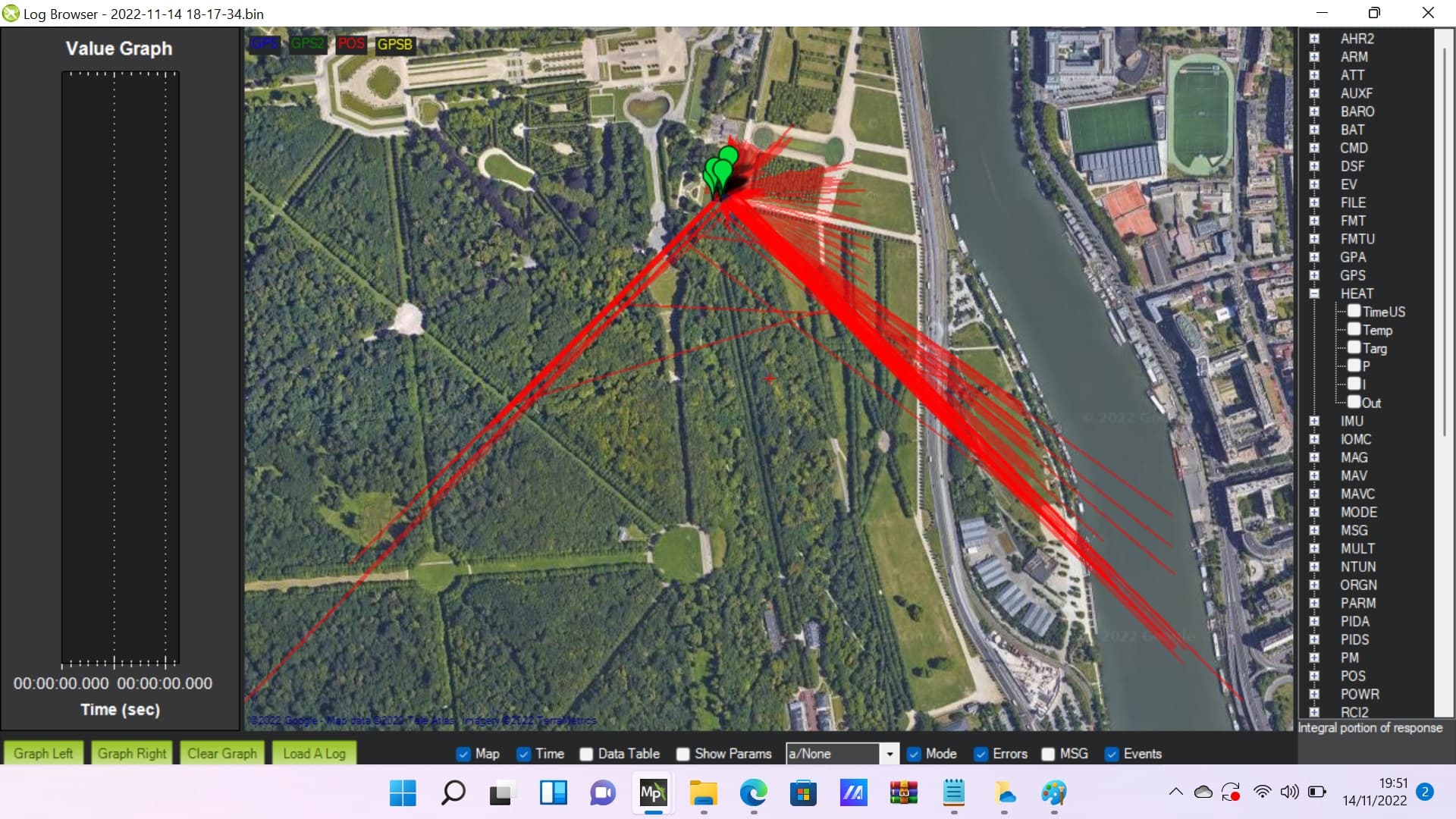
My boat is doing its mission for some hours quite well without any problems. Suddenly it starts a strange behaviour going back and forth, completely out of control. The map on MP shows its position starting to wobbling and oscillate. First just a bit, then more and more, at the end several hundred meters.
My boat has a Here2 as GPS and Ardusimple RTK as GPS2.
With the old firmware I set GPS_AUTO_SWITCH to 3, to just use GPS2 only.
With Rover 4.2 there is no “3”, or?
But I guess thats not the problem?
I have observed this exact pattern several times on a 4.3 beta version. It usually happens after I leave the autopilot & GPS turned on and in the basement (where there are no GPS signals obviously) overnight and then bring the rover back outside. I haven’t been able to reproduce the behaviour consistently but we believe it has something to do with EKF velocity and position estimates after (a) being on & running for a long time and (b) not being able to see GPS satellites for a long time. I am able to fix it by powering everything down and back up again. A soft-reboot of the autopilot (using Mission Planner’s control-F screen) doesn’t work to fix this. I’ll be interested to see if you learn anything! I am on Pixhawk4 & Ardusimple for both GPSs.
Interesting! In my case it not happens after a longer time without GPS. I faced it two times. In both cases the boat was on mission for quite long. Some hours or so. And the suddenly it happend. I suspect some kind of EKF issue. Before, I used an older firmware with EKF2 on cube black. Now EKF3.