I was looking through a friend’s pixhawk hexacopter log after today’s crash and can’t see the culprit. He runs AC 3.2.1.
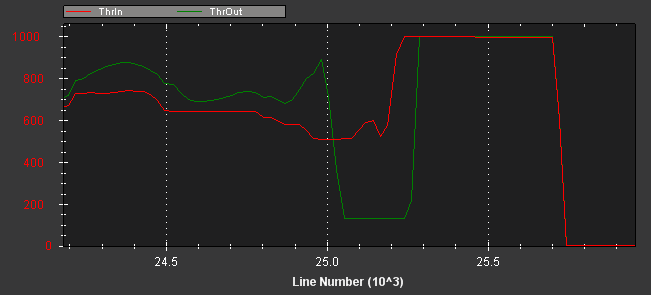
He was in Stabilized, maintained throttle around hover power at around 10m AGL and the hexa suddenly dropped to ground. The log confirms ThrIn (channel 3) had not had a sudden change while ThrOut did, basically to the “spin when armed” level for about 1 second. In that time the hexa fillped while falling, hit the ground, and recovered power as seen in ThrOut graphs, but the pilot cut the throttle soon after, while there was a second flip.
Only thing notable is a ~0.3V VCC spike around the time of the ThrOut drop. Can you spot anything else that could be related? Maybe it’s something obvious that we missed. Thanks for your time!
EDIT: after thinkng to myself: “someone is gonna blame a motor failure” I actually note that the moment pixhawk reduces ThrOut is at around 90 deg roll already, so this could be it. Yet, the pilot doesn’t recall a flip at that time, and recalls it as “someone dropped my throttle” only. (Also it is a hexa and as I’m told it has previously handled the failure of a single motor Ok.) Could the EKF have failed or received bad gyro readings? Since the logs has some data from EKF2, EKF3 and EKF4 as well, is there a way to see how consistent their outputs were? Only EKF1 has straight “Roll” and “Pitch” fields.
My friend is convinced this is a case of radio interference as this was the first time he’d been flying with other people (me) simultaneously. But it’s clearly not interference with his radio, since logs show correct rx values, has a sensor failure because of radio interference ever been documented?
Looks like the motors where not set straight as the copter was fighting a Yaw since takeoff.
After a while we can see the copter started to spin out of control and then it looks like motor one failed which it did not recover from. Single motor failure will result in the copter flying but will spin out of control because of that motor.
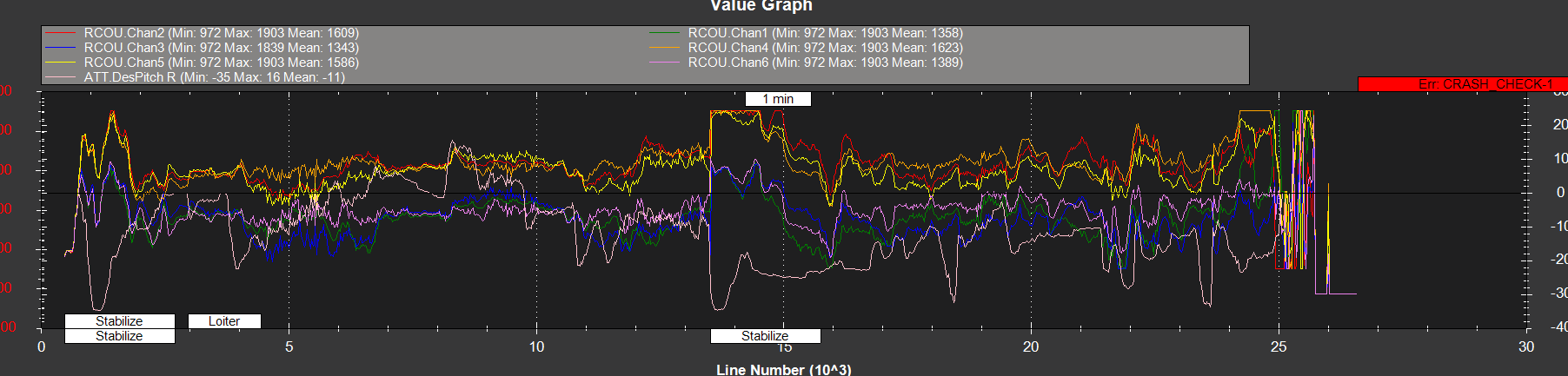
The motor output matches what was received by the radio input. The throttle is cut near the end of the flight and then spiked for one second. At the start channel 3 was at 1097 and at the end it was 974 and then spiked to 1208. This would indicate a radio failure as well.
I am not sure what the mechanical or electrical root cause could be, but I think there is some mechanical/electrical issue all along from the start:
The CCW motors are putting out significantly more power than the CW ones (top three RCouts on motors 2, 4 and 5 in the chart). Things go extreme first time shortly before 1 minute when the CCW motors max out when your friends goes in with 35° pitch.
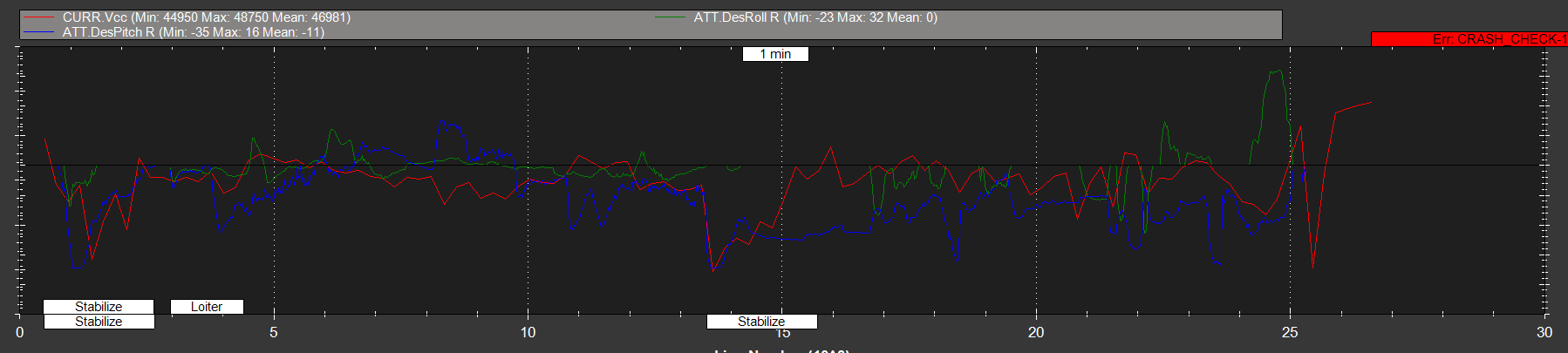
Your friend does not run a power sensor apparently, so it is hard to tell exactly what is going on on the battery side, but if you look at the following graph you can see that there is a sizeable dip in VCC, which is in sync with the 35° pitch lean forward requests to the copter. So maybe there is an issue with the battery (overloaded) or with the BEC - but it looks as the supply voltage to pixhawk goes down significantly when under heavy load - could be indication of battery issue… in this case the swings are 0.38V - quite significant and I think I read somewhere anything bigger than 0.15V is known to have caused issues. For relative comparison (not saying this is the root cause though), in my setup the VCC ripples are < 0.1V at all times even under heavy load.
Sorry if this just indicates symptoms of something that might or might not be related to the actual crash, but I’d look into both of these issues too if this were my copter.
I can’t really see it spinning out of control, in terms of navigation it did well until it started falling and flipping or alternatively (if the EKF / attitude data is to be trusted) started rolling first and then as a result cut throttle. Yes, looks like it was correcting yaw the whole time, as also noted by Christian Labeck, but that could be simply an ESC calibration thing too?
Do you mean the spike, to 1208, indicates a radio failure? Could it be simply a quick stick jerk? Apparently it has gone to around 973 a few times during the flight and that was gradual so it seems to be the pilot input.
I did notice the VCC problems, I wonder if those could be repsonsible for sensor measurement errors on a Pixhawk? I know I’ve had spikes and dips of 0.3V and more on an APM before and that wasn’t noticeable (that was on a tricopter with the servo connected to the same BEC so the source of the problems was clear).