Hello, after some bad results in autotune i decided to give a manual configuration of PIDs a shoot.
After performing autotune about 10 times the copter always felt really sluggish and unstable during flight. PID ended up very low. I tried pretty much everything i read here to try to accomplish a good autotune, lowered filtering to 10 and tried different aggr values, everything to no avail.
After manual tune (gains have been raised about 4X from what autotune did, D term even more) the copter flies very well, very stable both in stab and in loiter.
My problem is that i ended up with very very high gains and i am a bit worried:
P 0,2 (0,05 after Autotune)
I 0,2 (0,04 after Autotune)
D 0,09 (any lower D makes the copter wobble when returning to level) (0,004 after Autotune)
Quad is:
Copter 3.5 rc3
6S
27 inch props
4 X 170 KV T-Motors
4 X T-Motor 80 Amp ESC
8 KG
Now i am wondering what i am doing wrong because, expecially on large copters, looks like people are running Wayyy lower gains (Expecially on D term)
Is there any value to look at in logs to see if these high gains are causing troubles?
On one of my smaller size copters with 10" props I once tried auto tune and ended up with too small PIDs for control.
The copter was able to stabilize, but the inputs were too sluggish to control the copter. It finally, nearly crashed into the field.
Since then I was never trying this feature again.
I am not saying autotune is bad. Actually i think it is a great tool, i see thousands of people using it with satisfaction. So i am wondering what i am doing wrong or if it has some imitations on large copters.
From my experience,with Autotune you always get HIGHER PIDs than one you would set…
Did u autotune one axis or all together? i would suggest do one at time…and do it twice in a row,save each time,and than go to tune another axis…Did u do autotune from AltHold or Loiter?
What might be wrong is that your copter might need more weight…8kg for 27" props…hm,is that copter and LiPos only?
Are u gonna fly without payload?
What is your MOT_THST_HOVER ?Do you have MOT_HOVER_ LEARN set to 2(autolearn)?
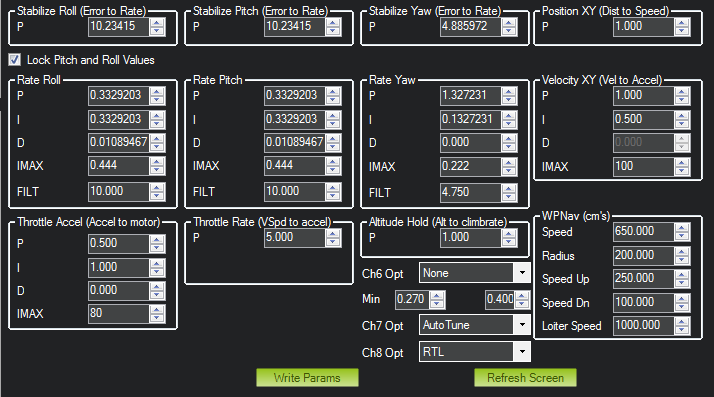
Can you at least post screenshot of Extended tuning window?
Although this is an Octa instead of a Quad, 15" props, but quite heavy. I think it flies pretty well, much much better than the default values, but not as good as it did with the DJI A2 controller.
After autotuning roll and yaw, roll parameters copied to pitch:
Hm…are we talking about Quad with 27" props or Octa with 15" props?
Two very different birds…
@ferocity02 to me your pids look too high…i would lover Stabilize Roll and Stabilize Pitch and Rate roll and Rate pitch P I D for 30% and Rate yaw P I D for 50% and start new autotune from there…each axle alone…each axle 2 times
Also if you did Autotune for all axle at once,u would notice that Pitch and Roll values are not locked so i suggest the same for you;unlock pitch and roll,do first,pitch axle autotune alone,save…do roll axle autotune,save…you will notice that values are different…
@anon67614380 hm…you really need to post more data…logs from Autotune might help to some expert for logs…
your manual tune does not look unrealistic to me…P and I at 0.2 seems fine,but D u should try around 0,01 instead of 0,09
What is your Stabilize Roll,Pitch and Yaw values?
I tried more tuning yesterday and went all the way up to:
P 0,33
I 0,30
D 0,016
Yaw
P 1,6
I 0,16
It is rock solid now, any lower on D term and it starts to bounce when levelling.
I flew relatively close to look for any bad tendencies and/or oscillations and found absolutely nothing,
All in all it flies very very well now both in stabilize and loiter.
Tried some Auto missions and were fine.
Motor temp was just warm after 30 minutes flight. I am wondering what bad effect i should see with so high D term.
“D is Derivative = Take it Easy correction: Is the correction going to fast? if it is slow it down (dampen) it a bit to avoid overshoot.
Rate Roll/Pitch D is used to dampen the response of the copter to accelerations toward the desired set point.
A high D can cause very unusual vibrations and a “memory” effect where the controls feel like they are slow or unresponsive. A properly mounted controller should allow a Rate D value of .011.
Values as low as 0.001 and as high as .02 have all been used depending upon the vehicle.”
“Lock Pitch and Roll Values” means both the Pitch and Roll PID values will be the same.
i.e. if you set Rate Roll P to 0.2 then Rate Pitch P will change to 0.2