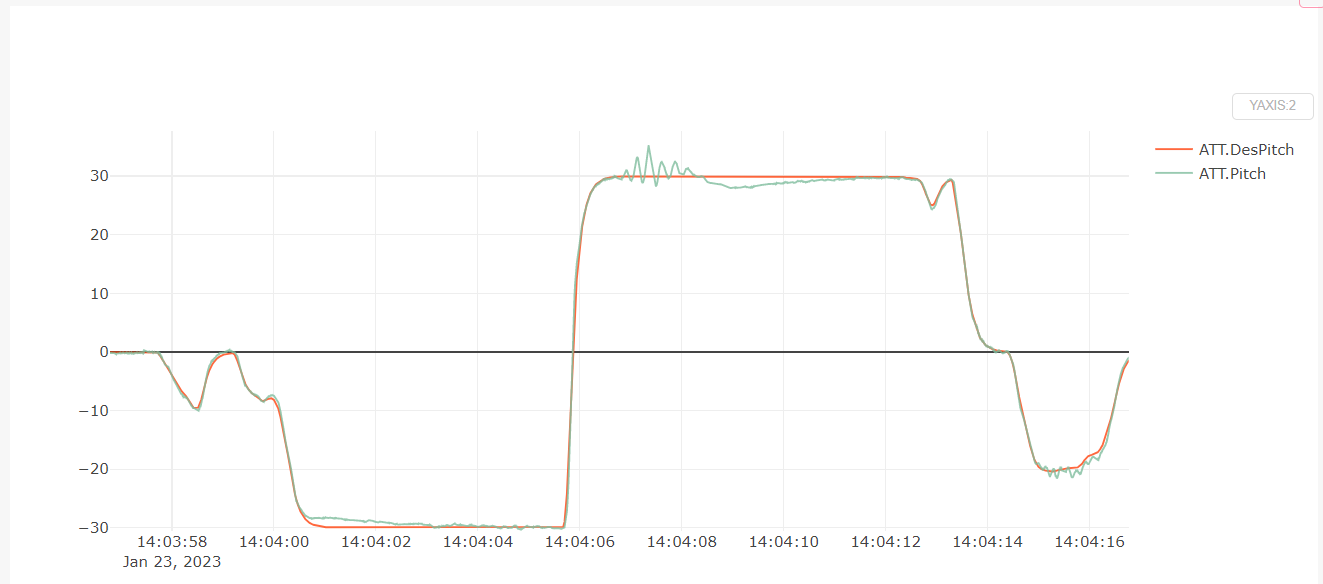
I have a 10-inch FPV quad running copter 4.3.2 with a weird oscillation in the pitch axis.
The oscillation occurs when applying a positive pitch (braking) and worsens at a higher speed.
The drone weighs 2.3 kg and is symmetric around the roll axis. It is a bit longer in the pitch axis, and the CoG is less than 1 cm in front of the CoT.
Any idea what causes this vibration oscillation?
Log file with fast sampling activated is available here: