Anyone have seen this before. I have now rebuild the octocopter and test this and it’s still there.
When motor are running in low speed it’s look ok, but when the ppm is about 1300 it’s start…
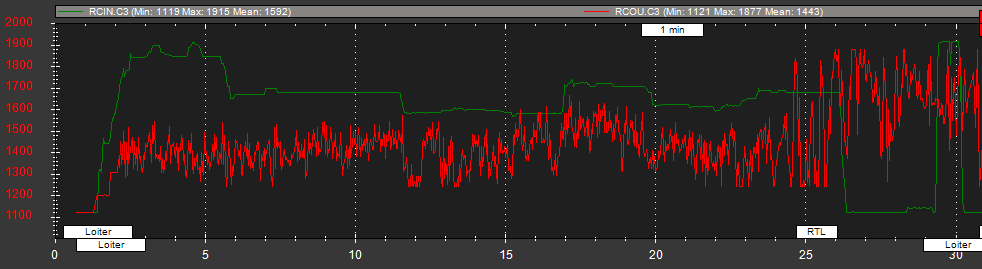
@ersko it seems to be related to vibrations, which are too high. There is clipping. I strongly suggest to check your setup (prop balance, frame stiffness, etc.). It also seems you ran autotune before. The PIDs are pretty different between pitch and roll. But this can for sure be related to the copter design.
I think I know the problem, but I will check it out in next day’s
I think the problem are the PID value’s is to high and then it’s start oscillating. I will now reduce
the numbers, to see if I’m right.