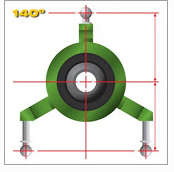
In that case you will use the H3-140 swash type and you have to reverse the servo directions by setting SERVO1_REVERSED, SERVO2_REVERSED, and SERVO3_REVERSED to 1 and reverse the collective direction by setting H_COL_CTRL_DIR to 1
@ChrisOlson will have to chime in on this. He’s the master mind behind all of the swashplate setups. you might just have servo’s 1 and 2 swapped. meaning you have to swap the plugs in the servo rail of the flight controller.