I’m trying to make sense of the desired climb rate variable from a flight log. Maybe I’m just misunderstanding how the value is calculated. I have the PILOT_ZVEL_MAX parameter set to 50 cm/s. After digging through the code, I would expect the CTUN.DCRt value to always be between -50 and 50. However, in my flash logs, I see that the range is from -120 to 20. Why would the values be outside of -50 and 50?
The logging parameters seemed to change significantly between Copter 3.3 and 3.4. Is there documentation anywhere that describes the full set of logging parameters?
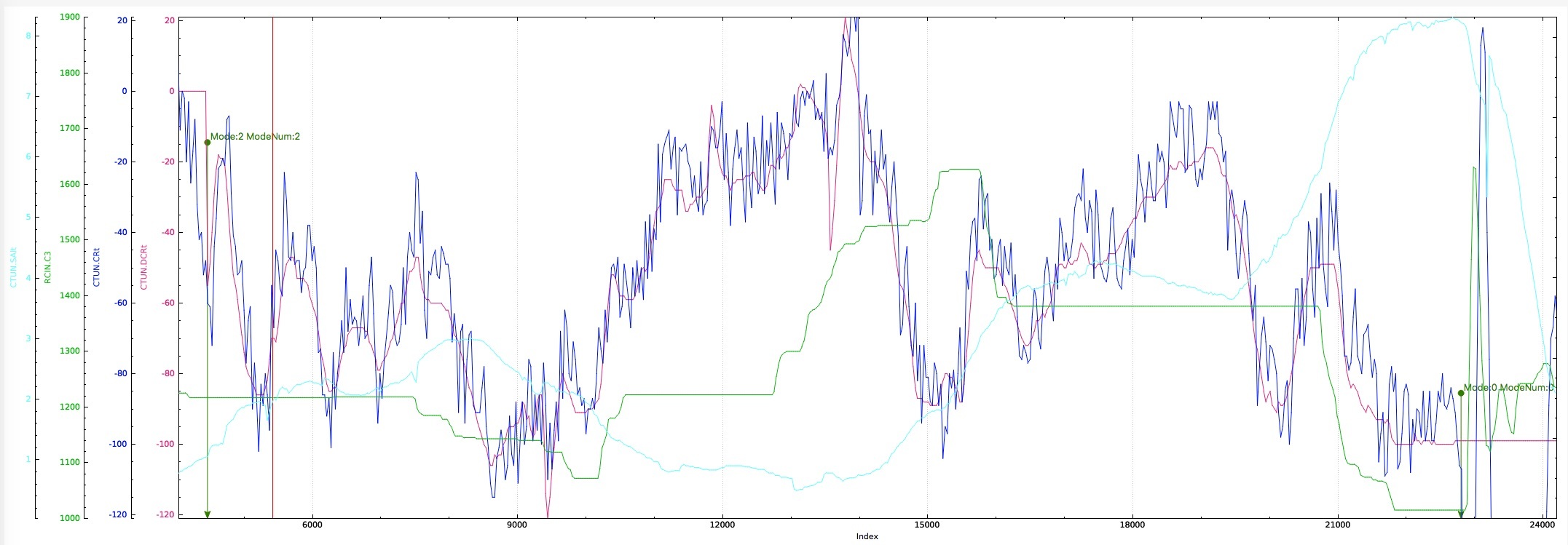
Specifically, I’m trying to determine why the quad continued to ascend when I was giving it a command to descend. Below are some details of the flight and a plot of variables:
Running firmware 3.4.2.
I took off in stabilize mode and switched to AltHold during the flight. The quad has a LidarLite v3 as a rangefinder and it seems to be reporting valid values throughout the flight (CTUN.SAlt). Around line 19,000 in the log, it begins to ascend. Around line 19,500 in the log, I reduce throttle input (RC3), the Desired Climb Rate and Climb Rate respond as expected, but the quad continued to ascend as shown by the rangefinder.
Any ideas what might be wrong, or what else to check would be greatly appreciated. I just upgraded to 3.4.3 and will try again tomorrow.
We’ve seen high Z vibrations cause a discrepancy between logged climb rate and actual vertical velocity.
In our case, it was worse when the firmware used the 2nd IMU, so we didn’t see it every flight. http://discuss.ardupilot.org/t/vertical-velocity-discrepancy/11434
Thanks for the guidance! I checked the ZVIBE and it averaged 75 throughout the flight and spiked over 100. I’ll be doing some work to get that down and trying again.