Hello everyone.
I’m using stable flying quadcopter with pixhawk & arducopter version 3.4, flying waypoints in Guided mode, sending waypoint coordinates from external controller.
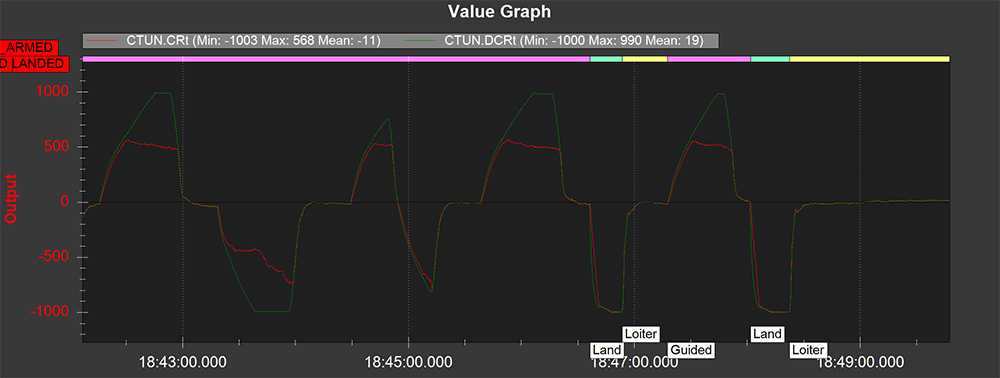
When I’m trying to make fast 10 m/s ascend and descend (WPNAV_SPEED_DN=1000 & WPNAV_SPEED_UP=1000), it seems i’m getting some strange limits at about 5 m/s climbrate, both up and down. Sometimes I can see descend speed at about 6-7 m/s, but it’s never reaches expected 10 m/s.
But if I switch to LAND mode, I’m always getting stable -10 m/s of climbrate.
Here is screenshot from log viewer, you can see Guided ascends/descends and LAND mode descends:
What is the problem? May be I need to change some code to remove such limit? I was trying to find some bottleneck in arducopter code, but didn’t find anything 
Thank you!