Hello all in the ardupilot forums. Your help has been invaluable, and I hope that you guys keep helping people like me in this journey of discovery of the amazing CUBE controller and Ardupilot firmware.
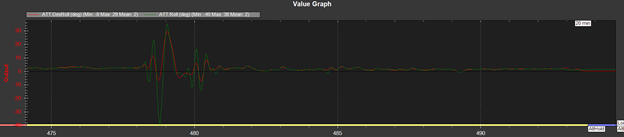
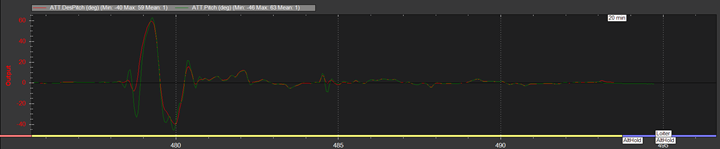
Yesterday, in a flight made to test the battery failsafe of the copter (which has a CUBE and the latest copter firmware to date), during an extended loiter, our pilot decided near the end of the run (after 19 mins) to give a small input to the copter (coaxial octo-copter), and right after the set of inputs the copter became out of control, as if something was wrong, for a total of approximately 3 seconds, after which, the copter regained stability, allowing us to ground the copter:
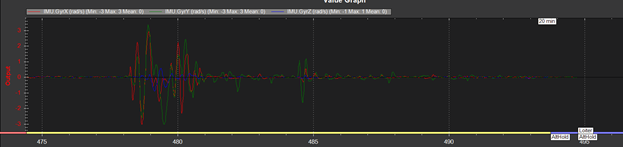
Gyro Readings:
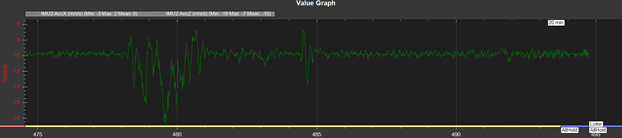
Acc Z:
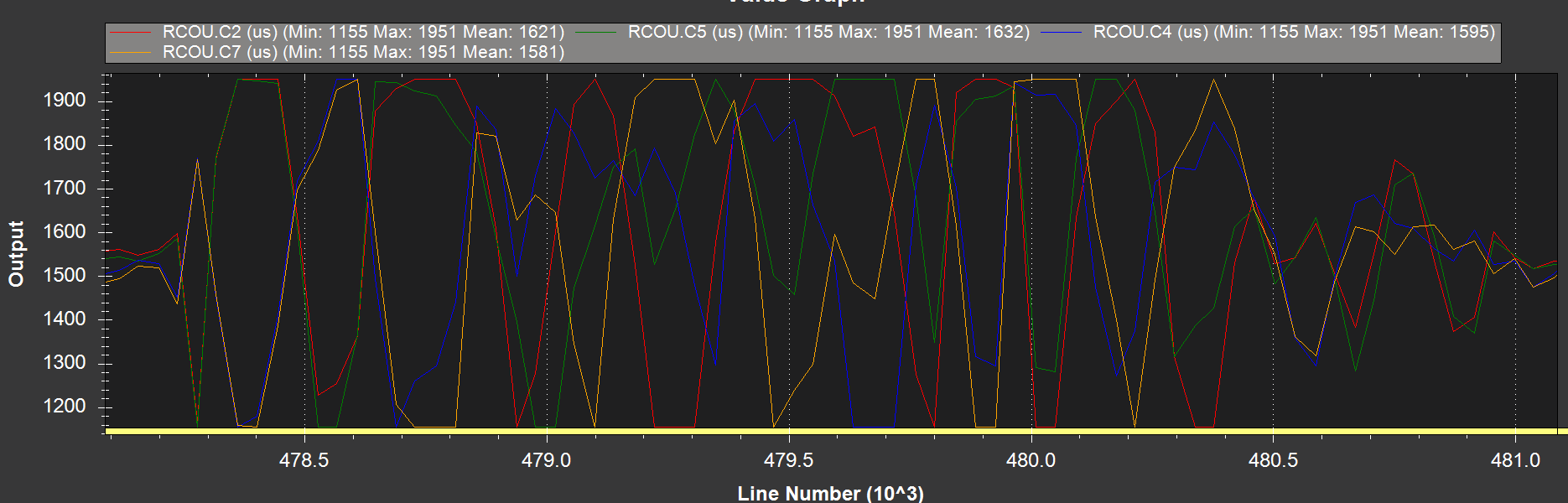
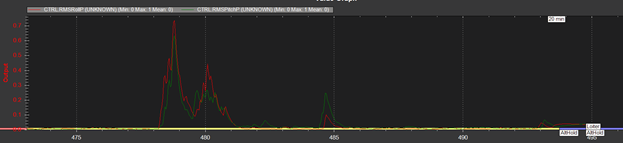
Pitch/Roll P (controller):
Desired Roll/Roll:
Desired Pitch/Pitch:
This event also triggered all kinds of issues, such as velocity/magnetometer variance triggers in the EKF, reduction of the satellite count in the GPS, voltage drop, but all of these I believe are just synthoms of the problem.
So far, the following are the possibilities I have been thinking about:
- Possible accelerometer gyro cross-coupling caused by the addition of a soft mount to the CUBE, since it used to experience very strong vibrations (we are aware that the recommendation is to hard mount the cube, but this frame is a large copter and vibrations could not be avoided).
- Possible mistuning of the copter, which led to an unstable mode that almost caused the copter to lose control from the very specific input given. The copter was tuned using autotune at its most restrictive setting.
- Much less likely: error in the GPS/Compass reading due to the addition to the new Here2 module connected by UAVCAN protocol.
If the first possibility happens to be the case, is there any for sure way to see if there is a cross-coupling between gyros and accelerometers directly from the dataflash log? Because FFT doesn’t show anything meaningful above 25Hz (no 80hz peak).
Here is the log of the flight. Any type of input will be appreciated.