strange behviour at distance when RC telem power interfence…like PID gains are reduced
reducing max power on telem to 25mw solves the issue
Questions:
Why does it take EKF3 so long to become active?
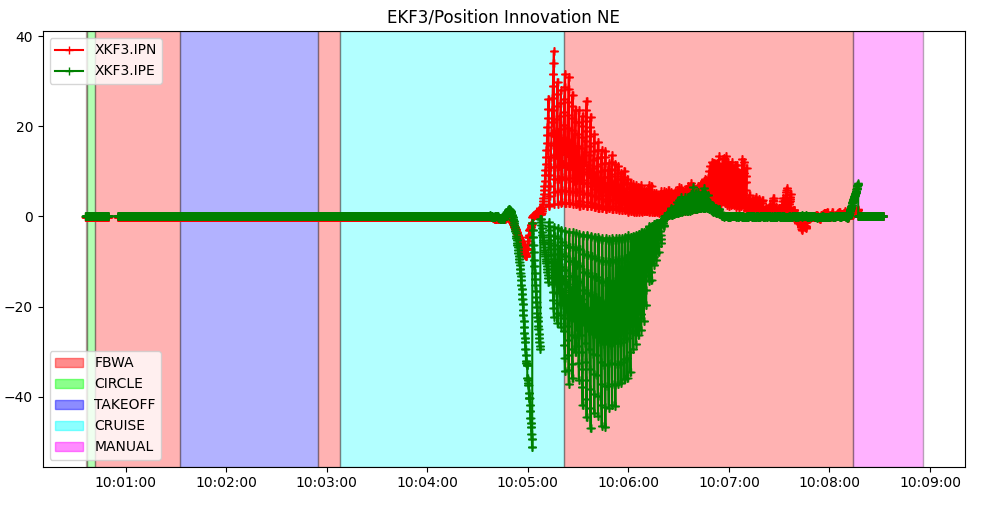
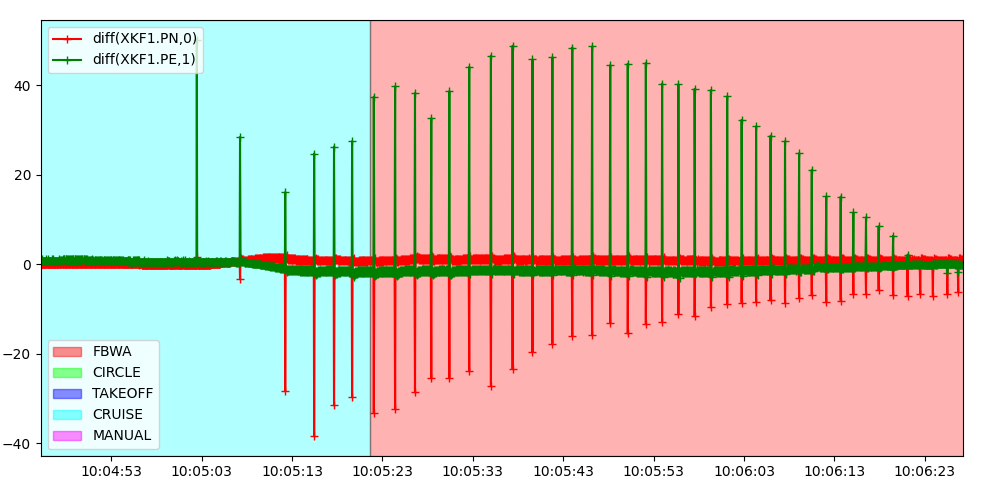
Why to scaled position innovations appear so noisy, yet not really close to 1 at any point? the RX and GPS are relatively close, leading one to suspect the RF from the RX telem
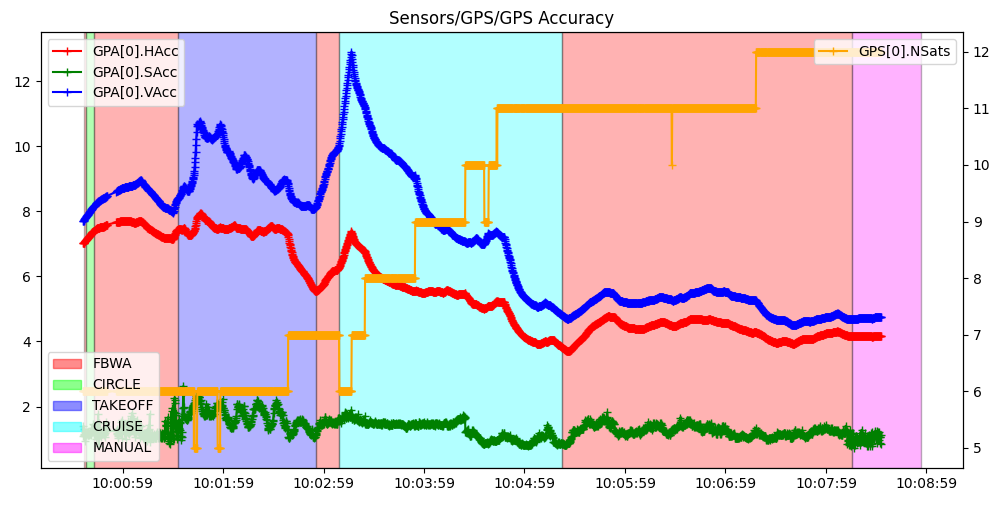
The GPS thinks its accurate as far as I can tell
Ultimately what causes the poor adherence to demanded attitude at the end of the flight after EKF3 becomes active? @tridge
thanks…thanks…my question is if position gets bad, why does the demanded att vs act att get so sloppy? I could understand that the demanded att/navigation gets wonky…but whye doesnt the rate controllers keep the actual and demanded still tight?
It looks like the EKF didn’t complete its yaw alignment to GPS until 3 minutes after takeoff. This resulted in bad health after the yaw was reset and GPs aiding started that required a couple of minutes to sort out. This is currently one of the risks associated with flying without a compass. I will check the log and see what could have prevented it doing the yaw alignment to GPS that is normally performed as soon as a flying condition is detected, but preliminary analysis indicates the GPS quality checks were not passing preflight. For example look at the large GPA.SAcc value.