Before I was flying on CubeOrangePLUS with arduplane 4.3.1 a lot. The aircraft is tuned enough so I have stable and predictable flight in auto. A while ago I’ve received a new CubeOrangePLUS-BG edition (I think so, because the colour of the cube is closer to bronze that the bright orange that I had before, but there are no info about this on the cube or package)
But this cube is impossible to flash with 4.3.1 firmware so I’ve flashed the new (at that point) 4.4.1.
So I was flying with two identical aircrafts the same day (same weather) with the same mission (same wp file). Both aircrafts has the same paramlist and setup. The first flight was with old CubeOrangePLUS and AP 4.3.1. Everything was fine, as always
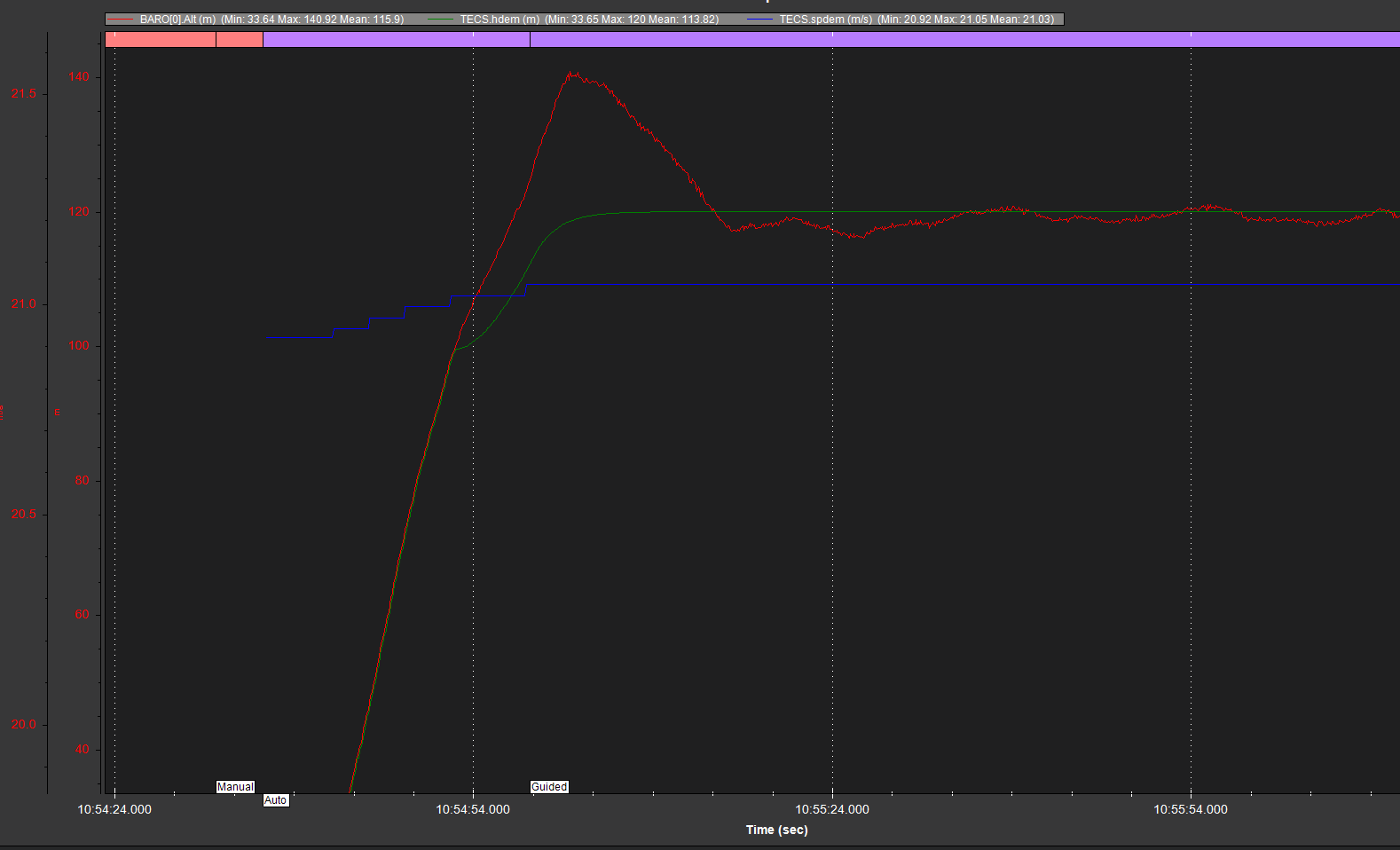
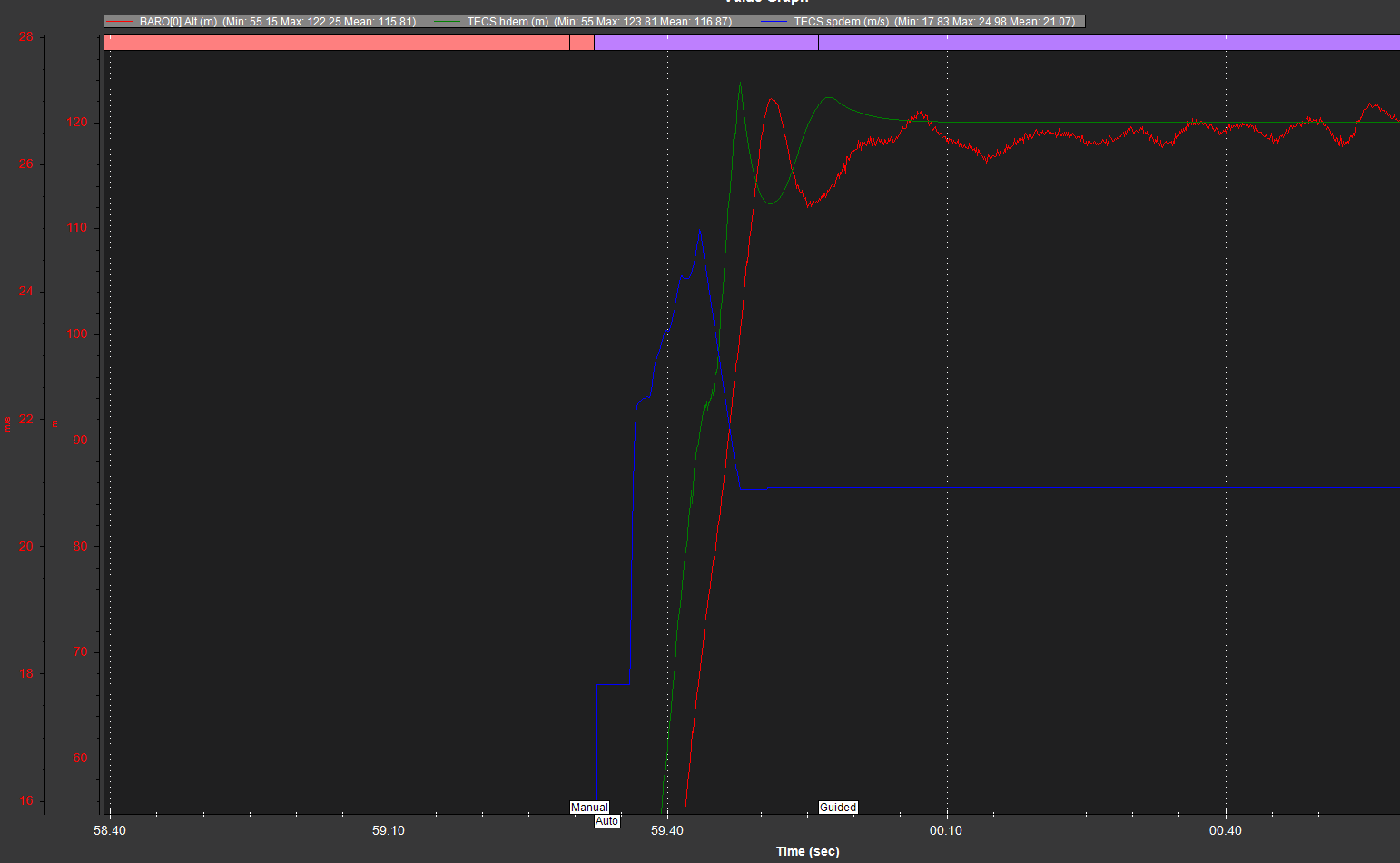
The second flight was with CubeOrangePLUS-BG and AP 4.4.1. After reaching the target alt (with some overshoot with alt and speed, as always) the aircraft switched off the motor and pulled nose UP, for this reason, the airspeed decreased from 25 to 16 m/s rapidly (target was about 21), after that pushed the nose down to gain speed and after nosedive proceed the mission. On the screenshots below you clearly could see the difference in TECS speed and alt demanded behaviour.
The second problem is oscilations and unstable altitude (looks like PID is not good enough) but the same aircraft has flown later with old cube and 4.3.1. with this paramlist like it should. As I see from Release notes, from 4.3.1. to 4.4.1 there were no PID logic changes
Screenshots attached bellow. Logs under the googledrive link because they are too big. https://drive.google.com/drive/folders/1u0mp5O2o4ezAorB8YvDuQ5cVAkGd3wS2?usp=sharing
I have gone through all parameters but have not found anything that could remind me the solution for this problem
Have anyone any comments or ideas?
Going along the advice of TechSupport, we were trying to localise the problem (separate new CubeOrange+ BG-edition autopilot and new firmware 4.4.X)
This time we were flying with old autopilot (standart CubeOrange+ with bright-orange paint) and new 4.4.X firmware)
The first flight was with old autopilot (bright orange cube orange+) and new firmware 4.4.1 (the same firmware was used in previous flight with CubeOrange-BG)
All problems were the same as last time (stall during takeoff and oscillations during cruise)
Then in the field we have changed the firmware to 4.4.4 (the newest stable available) and tried to fly again (the same autopilot on the same plane)
Problems were the same
On the same day, the same type of UAV have flown. It was a different aircraft with old CubeOrange+ and firmware 4.3.1 - everything was fine, so (again) it’s not the weather conditions causing those problems.
Our main concern is not even about oscillations (maybe we can correct them with damping coefficients and PID tuning), but about the manoeuvre after takeoff:
Autopilot pitches up and turns off the engine, after stall it lowers the nose to gain speed (everything is the same as before).
We agree, that this is not the BG-edition autopilot’s fault, but the firmware problem.
But due to the fact that we could not use 4.3.1. firmware on those new BG-edition autopilots, they are useless at the moment.
Just for the information, we were trying to change
TECS_TKOFF_IGAIN, TECS_SPDWEIGHT, TKOFF_PLIM_SEC, takeoff pitch angle in the waypoint file in order to make levelling smoother. It has no affect on that “stall” manoeuvre after takeoff.
Why do you think, that this is a firmware problem. Many user user are using this newer firmware also with Cube Orange+.
I am not sure but I think that the two planes are not 100% identical. There might be small differences which need different tuning. So did you just copy the parameters from one aircraft to the other or you also tune it afterwards.
Also why do you think that the new Cube is not working with the older firmware, just for a test
Thank you for your answer.
As I’ve said in the very first message, we had two flights of similar airframes but different autopilot-firmware setup. The one with BG-edition and 4.4.1 had a terrible flight. After that we’ve changed the autopilot and firmware to “old CubeOrange+” and 4.3.1 and with the same paramlist it has flown perfectly. So it’s not the airframe problem.
I agree that every aircraft needs tuning, but not THAT much.
The new CubeOrange+ (BG-edition) is not working with old firmware (4.3.1), because new cube has other IMU unit. And 4.3.1. does not have suitable driver or something like that, and during initialization it gives error $CHECK_IMU1_PRESENT. And, as the result, autopilot could not initialize itself.