Hello to all,
I have been searching my log files for a whole day now to find the cause of a problem that occurred in loiter mode during my last two flights with my scale helicopter (800s with 10kg).
I am now quite good at log analysis regarding vibrations. However, I am far from being a log analysis expert.
Therefore I need your help. Many thanks in advance.
During my last two flights the following phenomenon occurred:
I was flying in loiter mode (which I do most of the time) when the helicopter suddenly rocked violently back and forth over “pitch” in forward flight.
After the first moment of surprise, I switched back to Althold mode. Hereby the back and forth wobbling disappeared.
I flew the heli to me, hovered briefly and then switched back to loiter mode. The rest of the flight was normal again.
With a second flight on this day it happened after short time again that the heli in the Loiter mode (and in the forward flight) over Pitsch again back and forth wobbled. I switched back to Althold mode, where the effect stopped again, and landed.
On this day it was almost windless.
On the first flight, I was able to remember the approximate flight time at which the phenomenon had occurred by looking at the flight time on the remote. It had been about 3 minutes since the rotor started up.
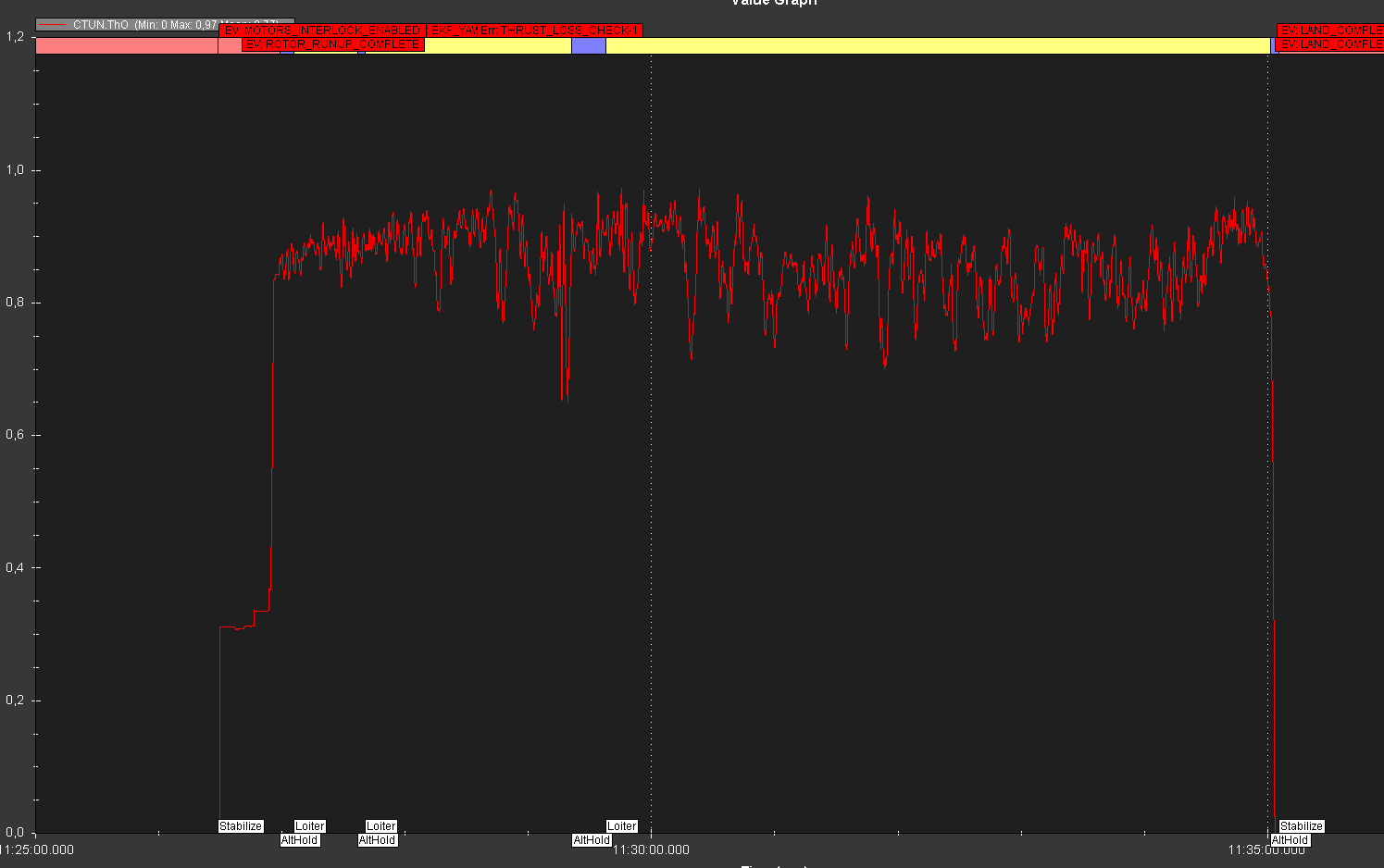
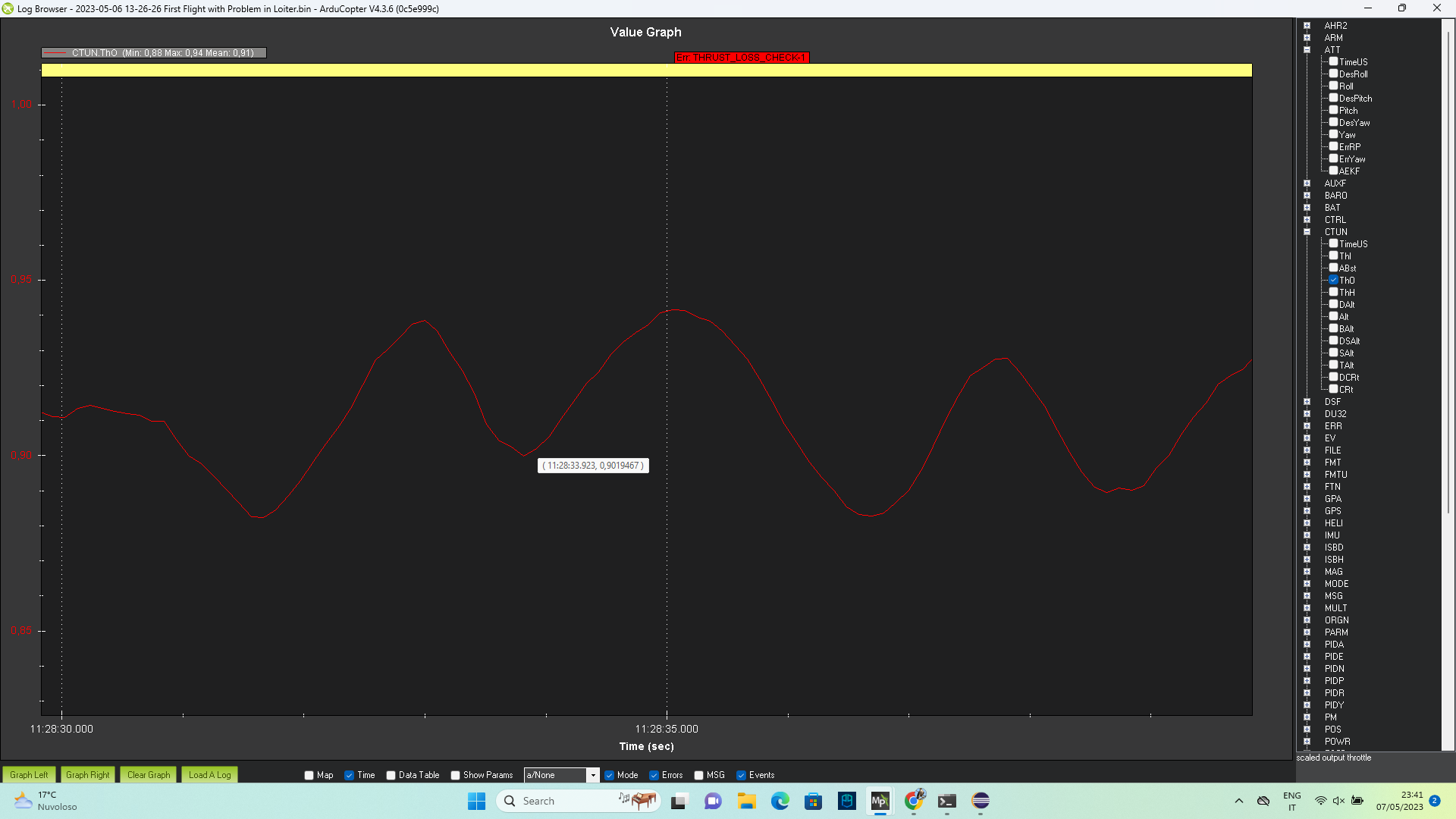
I looked at the log file of the two flights. In doing so, I noticed that I had the following error message in both flights:
“Thrust_loss_check-1”. This error occurred about the same time that my flight clock on the remote control said the wobble also occurred.
I downloaded all the log files stored on the FC from the FC to my PC and looked in all the past log files to see what “Error” messages were stored.
I noticed that in none of these past flights does this error message appear nor does the wobbling itself appear.
What I also noticed: Until these two erroneous flights I had version 4.3.0 on my FC.
After I updated my FC to version 4.3.6, I made these two flights and both have this error and the wiggling back and forth in loiter mode.
Hence my guess that it is due to version 4.3.6?
Or did I make a mistake that I updated from version 4.3.0 directly to 4.3.6? Should I have done all the intermediate updates?
Here are the links to the two bin files.
Thanks for your help
BR
Heri