HI, yesterday I had bad flight with my okto/Pixhawk and radio Turnigy 9x with FrSky receiver and 3dr ppm encoder.
here video, with mission planner tlog on play, and the graph RCOut of the 8 motors. vimeo.com/91868355
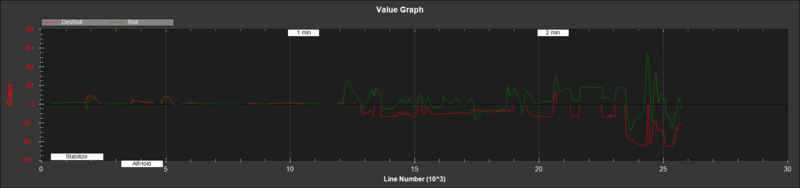
after the first minute, the multicopter began to go sideways to the right, and control became very difficult, in particular on roll.-
Graph des_roll and roll (after the first minute do not coincide, but are shifted !!!)
after takeoff I used “Dual Rate 35/40%” on elevator, aileron and elevator.
when I realized that something was wrong and the roll was working badly (between first and second minute) I decided to remove “dual rate” and return on mode flight “stabilize”. (mode flight on aux 3 position)
the drone …landed… in althold, but the mode Stabilize not been inserted.
I suspect a problem with my radio because last year, with other frame, motors, esc’s and flight control but same radio, I had exactly same problem.
What do you think?
Can I exclude problems with sensors of the flight control ?
update:
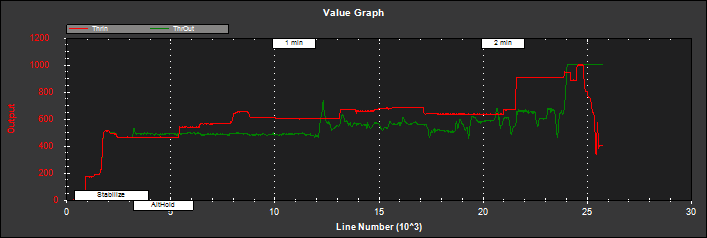
I was using 3.1.2 and I found, ad the end of log (thanks to Roberto Navoni) the “bug stability” ad maximun throttle, then I finally found final crash was due to this bug.
here video: vimeo.com/91868355
here throttle IN (green) at line 24 I put throttle on max
I agree for mechanical failure on motor/esc nr. 8
Fortunately and amazingly the okto has not been damaged and today i’m just looking for mechanical failure on motor esc nr. 8, with the search for problems, no good solder, sync issue, etc.
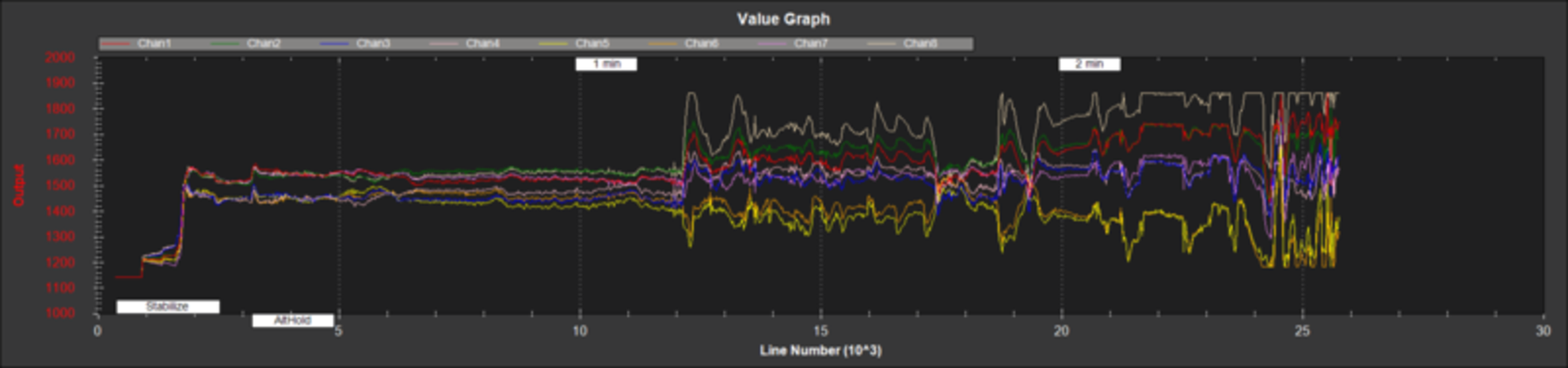
I thought to the bug stability at end of flight, from line 24 to end, because when I putted throttle to max motors 5 and 6 have gone to “0”.
I’m still investigating the cause and will update here when I realized.
Thanks for reply.
[quote=“mikronerd”]I agree for mechanical failure on motor/esc nr. 8
Fortunately and amazingly the okto has not been damaged and today i’m just looking for mechanical failure on motor esc nr. 8, with the search for problems, no good solder, sync issue, etc.
I thought to the bug stability at end of flight, from line 24 to end, because when I putted throttle to max motors 5 and 6 have gone to “0”.
I’m still investigating the cause and will update here when I realized.
Thanks for reply.
I just tryn[/quote]
The code rightly prioritizes roll and pitch over throttle. It is sending some motors to minimum and some to maximum in an attempt to achieve a roll and pitch rate. It is not fully succeeding, which is why the copter has a roll bias.
By the way, if you increase the IMAX parameters, the copter may be capable of eliminating that roll bias.
Thanks jschall.
I have never changed iMax parameters.
I know that imax parameter is closely related with the “i” parameter, but I do not quite understand this explanation.
on “rate pitch/roll”, i use default parameter, “I” 0.1000 and imax 5.000,
if “I” is a fixed parameter, how will arrive on 5.000 ?
Or when I’m flying it can change dynamically and the maximum is reached precisely 5.0000 ???
I’d like to know a practical example please, In a practical situation like the one that happened to me, if I had imax to higher values, how could this happen?