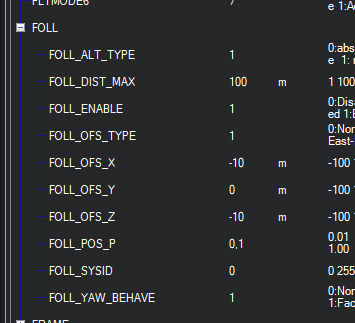
Follow mode is set to relatvie altitude of 10m above:
 !
!
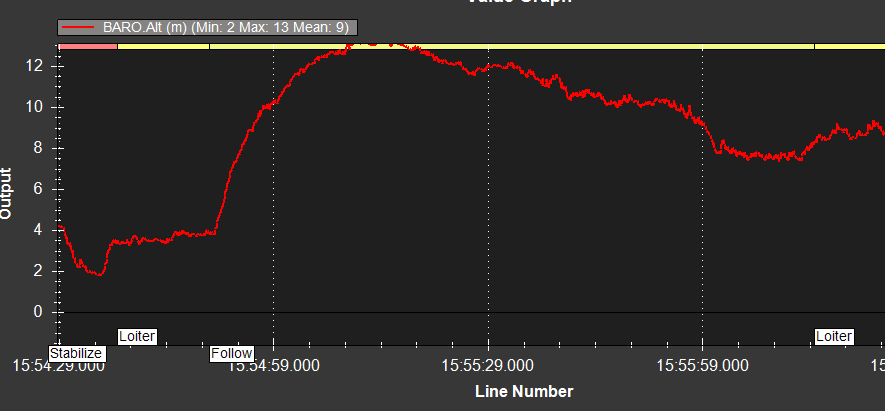
Logged altitude is this:
Is this unprecise altitude sent from the GCS or a firmware problem ?
ArduCopter 4.0.0
QGC Android daily 2020-01-03
Follow mode is set to relatvie altitude of 10m above:
!
Logged altitude is this:
Is this unprecise altitude sent from the GCS or a firmware problem ?
ArduCopter 4.0.0
QGC Android daily 2020-01-03
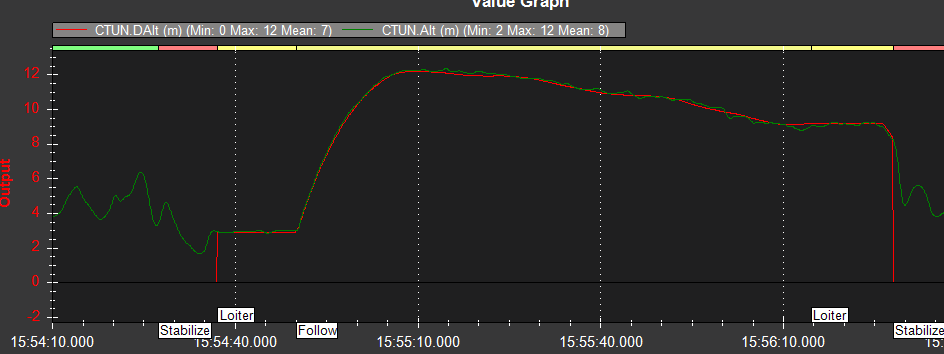
on the graph there is only the height from the barometer after the probably unstable start. The barometer on the ground probably indicates 2m. See on the ALT, DALT chart
Thanks for testing Follow mode, it hasn’t been used a lot yet so feedback is greatly appreciated.
The CTUN.DAlt is the desired altitude (above the EKF origin) and the CTUN.Alt is the actual altitude. They are staying together so this means the altitude controller thinks it is doing the right thing. I suspect the descent is because the thing that the copter is following has reported that it has descended.
Can you describe the setup a bit more? Is the copter following another vehicle or are you perhaps using QGC on a tablet and trying to make the vehicle follow you?
If possible maybe attach or provide a link to the onboard log?
I am very interested in follow mode.
Yes, I tried to make copter following QGC.
My 1st suspect was unprecise altitude sent from the GCS as written above.
But I don’t know how to verify that.
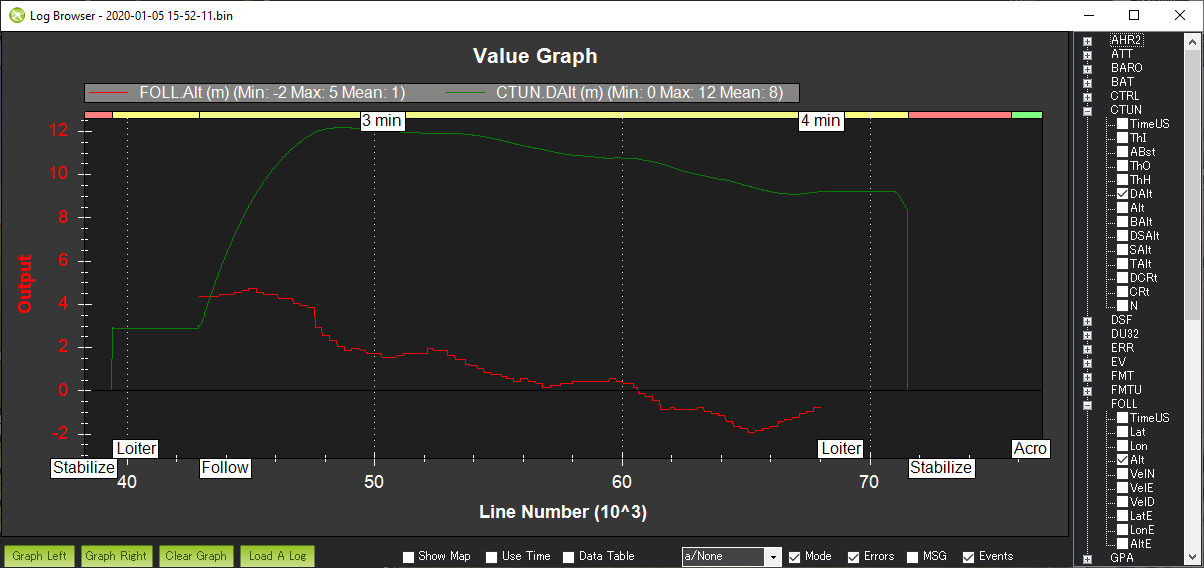
Here’s a graph of CTUN.DAlt (vehicle’s desired alt) and FOLL.Alt (QGC’s reported altitude) we can see that QGC’s altititude is falling. So the copter looks like it’s doing the right thing.
Now if the GCS wasn’t really falling then we basically have an estimation problem in the GCS… which is difficult for us to resolve on the AP side but perhaps @DonLakeFlyer has some ideas.
Thanks for the log.
Ah, I see.
I’m not sure if @DonLakeFlyer will read this, I will post it in the QGC category.
How did you make the graph look like this ?
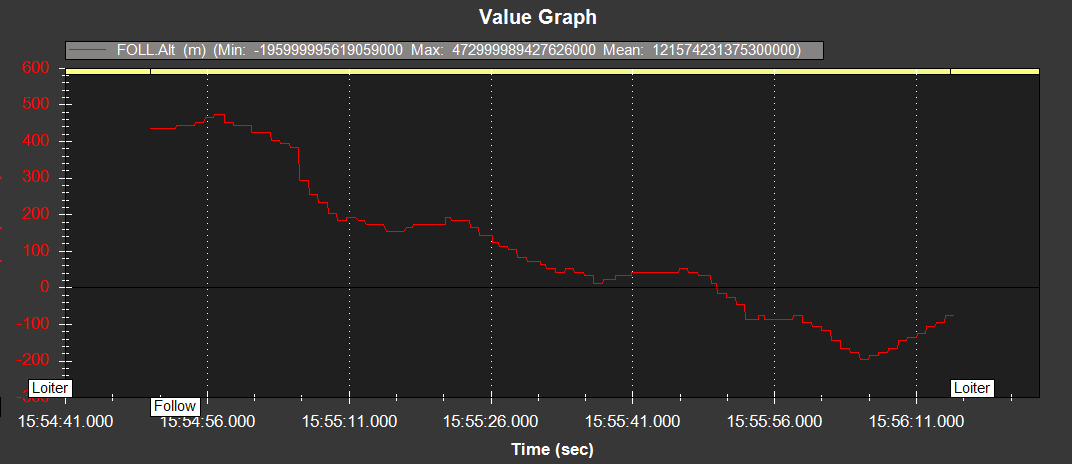
If I plot FOLL.Alt I get this:
Values in the data grid are between -196 and 473 (I assume in cm).
Re the graphing, I didn’t need to do anything special to make the altitude appear in meters (yours is being displayed in cm). I suspect I’m using a newer version of (beta) Mission Planner that includes a bug fix…
I have this one:
![]()
@twistedwings, I’m apparently on a later version (1.3.70 build 1.3.7309.21580) so perhaps try Help>>Check for BETA Updates
I would like to try this follow mode with copter (v3.6.3), but from QCS or MP how can i initiate it? I read an earlier reply to use “GLOBAL_POSITION_INT” message, but exacltly how can i do that? And what are the parameters? Is there a way to automate this behaviour, like a saved ‘mission’?
Thanks in advance!