Hi,
this is something i first got back on 3.4.6 and i hoped to get rid of it with 3.5.
Currently running 3.5 RC7. RC7 runs great on a smaller quad i just build. But now i ran into some serious trouble with my large quad.
What i got: Took off in Alt Hold mode. As soon as the throttle was above center stick position the quad lifted instantly and very fast to about 5 meters. I pulled down the throttle but the quad stayed at the height for just a while. Than it started to gain altitude in just small steps and very instantly. Switched to loiter to try stabilize it. All with throttle nearly at minimum.
Next i encountered some rapid altitude changes. Managed to get it down a little and as soon as it was as near to the ground as i was comfortable with it i pulled the plug, motor emergency stop.
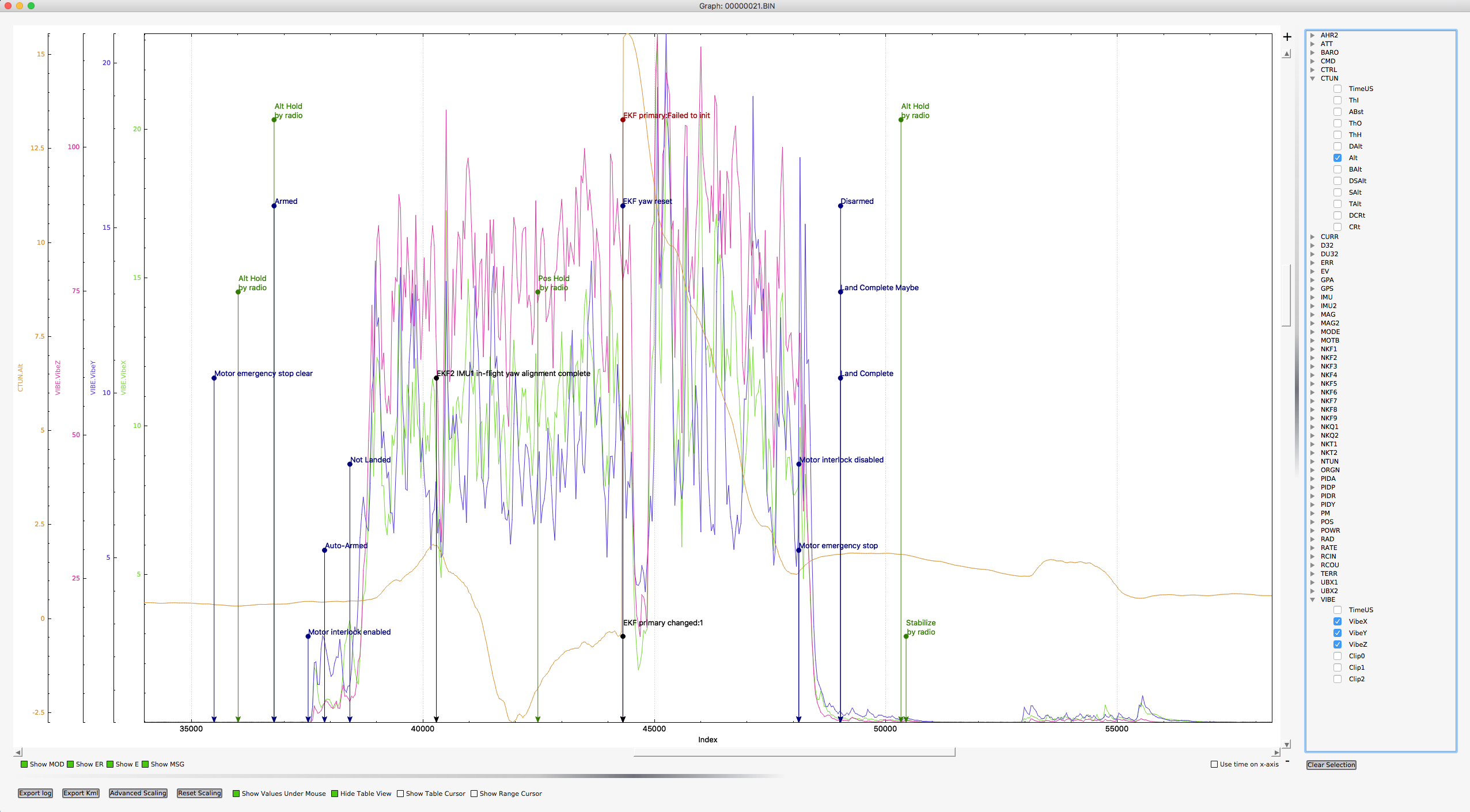
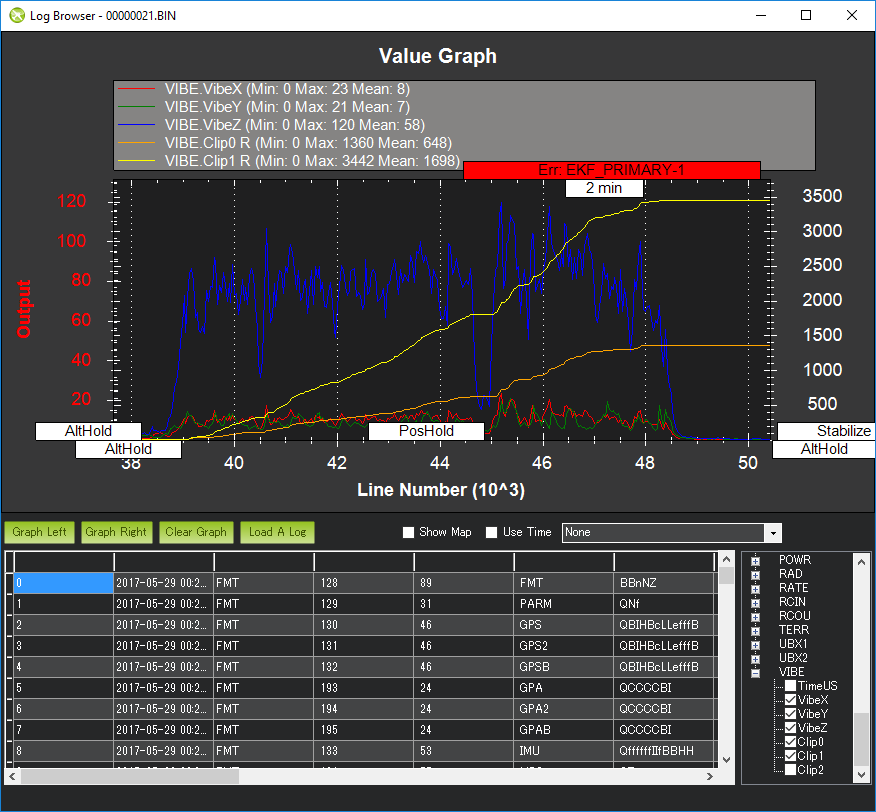
Reviewing the log i can’t make any sense of this behavior. The first, rapid, gaining of altitude is not shown in the log in the baro tab. I think it is shown with CTUN.ALT R. looks like the behavior. In comparison with that i looked at CTUN.ALT D which is far off. What i think is really odd is, that the BARO.Alt changes near to nothing during this. This value changed a lot later. Initial climb started at line 8526.
I’m some kind of clueless. And a little afraid to fly again until i know what is going on.
I hope someone can see more in the logs than i do.
00000021.BIN (2.6 MB)
Forgot to mention, that i did a few flights without any problems. This behavior has grown through maybe 5 flights to this point. Started with rapid altitude gains in fast forward motion and ended in this case.