Hey all,
I’m flying ArduCopter 3.5.0-rc4 on Pixhawk Cube and in the middle of normal POSHOLD flight the copter flips over, roll and pitch toghther.
After examine the SD card logs i’ve noticed that all the scheduler logs were stopped for 2.46 seconds and then everything comes back to normal with a pretty big position variance which I guess caused the crash.
That is weird because I did not got any “Err: CPU-#” on the log.
The logs ACC# and GYR# were the only one that keeps sampling but after looking it deeper i’ve noticed that this logs are not related to the scheduler and called via separate periodic callback of 1000Hz.
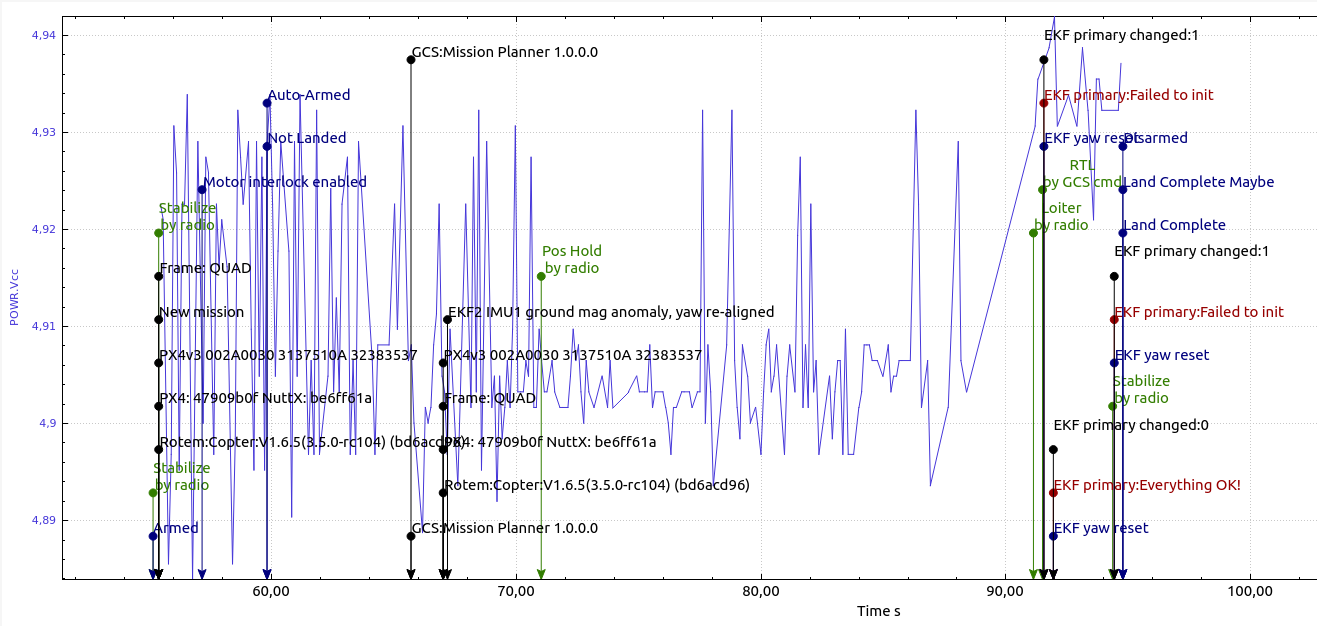
Also, please take a look on the logs timestamps, they are really messy and inconsistant.
I don’t know if this could be related but in the mid flight right before this event, a mission planner connection were made and all the parameters were download.
What could be the problem?
Thanks, Gal.