Calibrated again, in different options, in different places. Tried different versions of Ardupilot. I tried to change the angles in the parameters. This problem appeared on three FCs. All of them were downloaded via STM32Cube. After switching to Inav, the orientation was corrected. That is, it turns out that the STM32 Cube spoils the Ardupilot itself.
In the photo - Pixhawk 2. They brought me several FCs for installation. I flashed everything using STM32Cube. Now the “victims” have Matek 743, Matek 405 WTE, SpeedyBee 405 WING
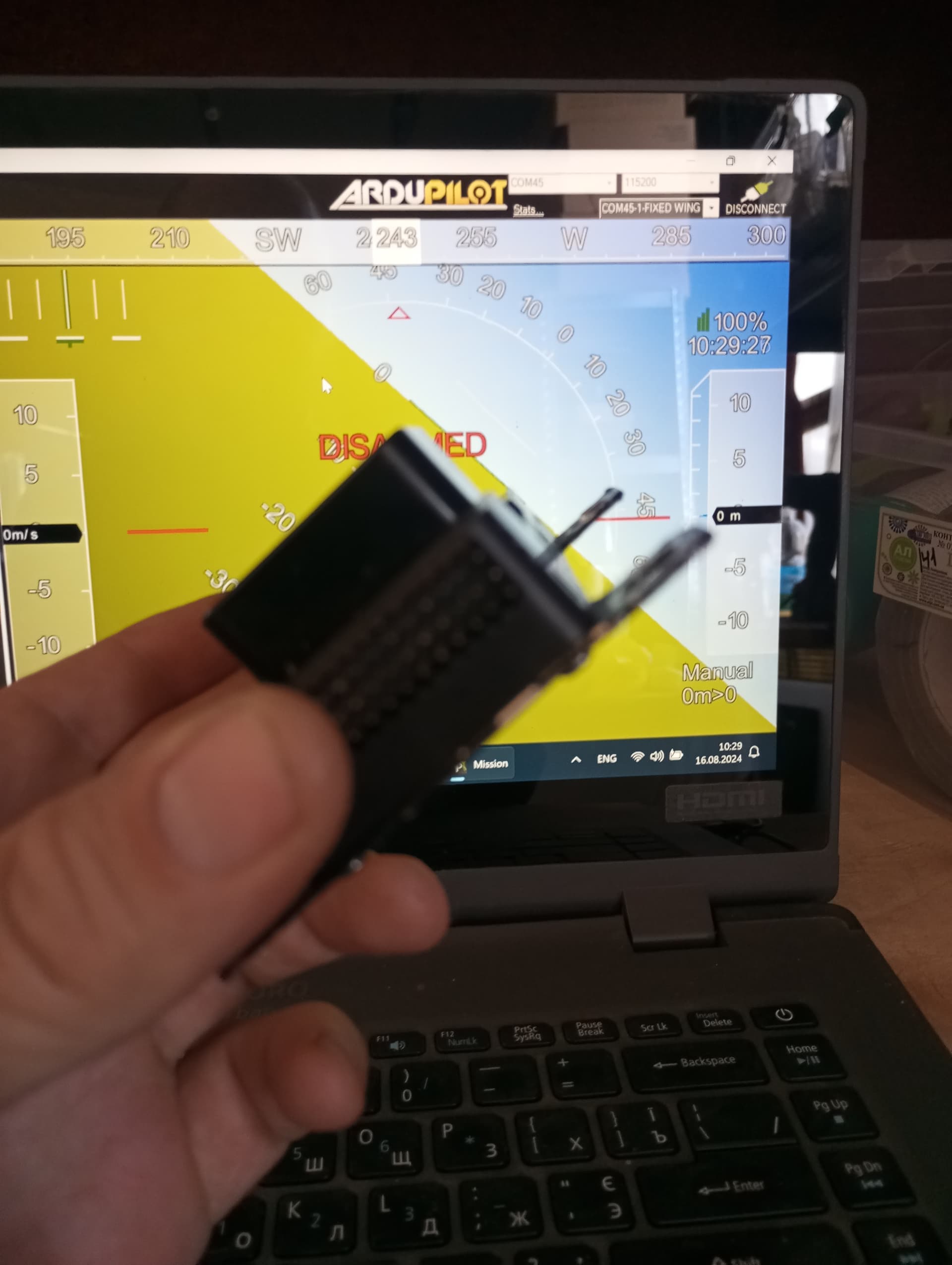
the correct board orientation parameters - I tried to change it several times and in different variations. Doesn’t help. Reset to default and Full chip erasing does not help.
You’re the one confusing left and right
When your craft is rolling left, the horizon will rotate right. The horizon is not your craft.
Same thing when your craft is pitching up, the horizon will move down.