Before the flight you see here, I gave the command to take off in guided mode and successfully landed with rtl twice. We ended the flight in land mode. Only a few propellers broke but I don’t understand what the problem is. As far as I can see in the log, there is no problem, but why did it happen (it is a flight made with safety precautions) (octo x, tmotor p80, mf3016 propeller)
Thank you for your answers. Video and log file are in the link.
https://drive.google.com/drive/folders/1eG4_sds7EDBX6REfMj11hCgx_XNPB8hn?usp=sharing
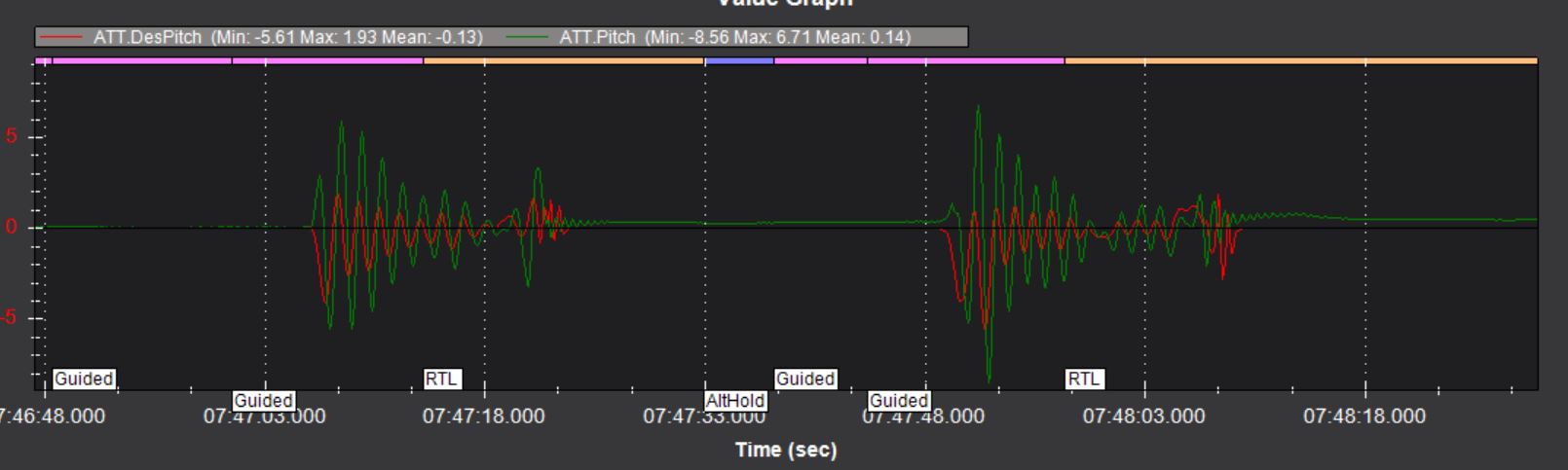
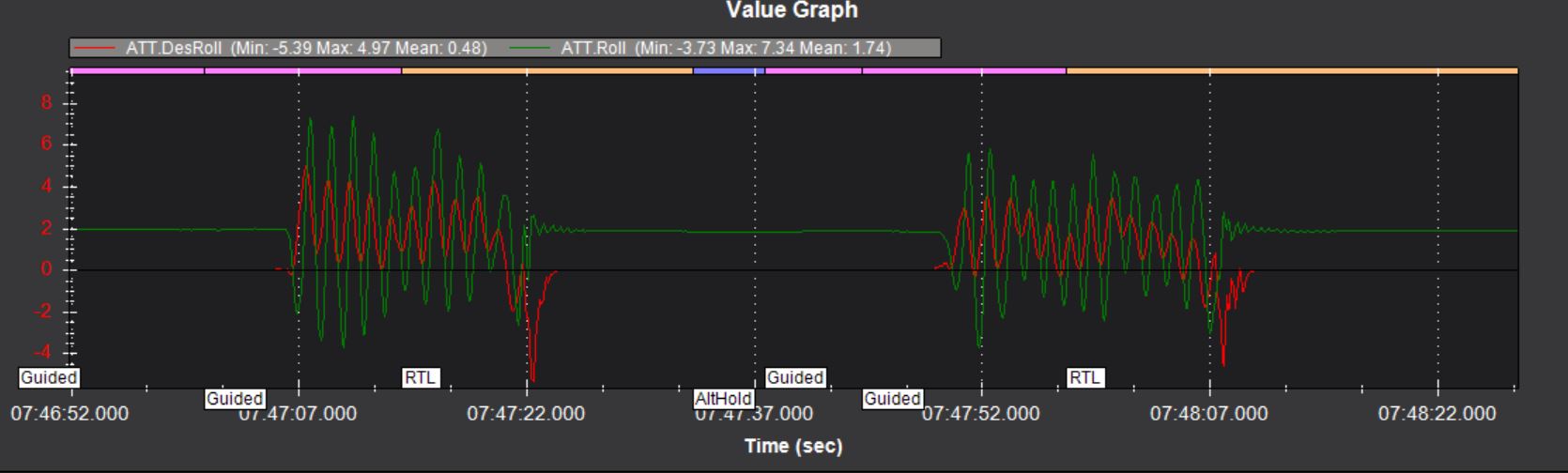
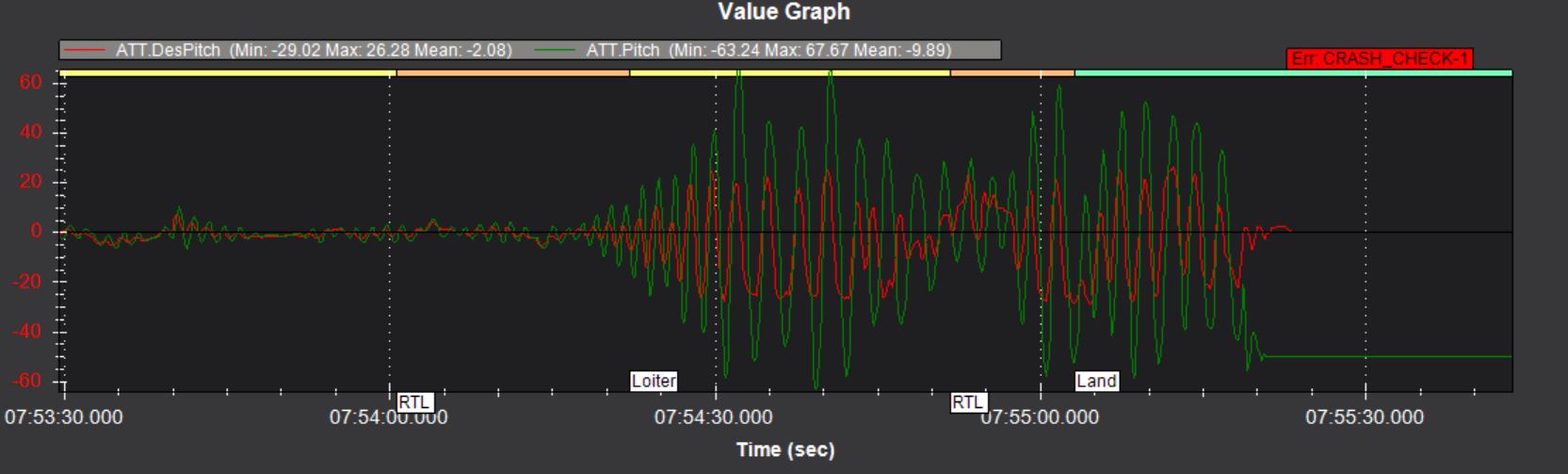
What “safety precautions”? Tune look bad with Pitch and Roll oscillation that seemed to increase into instability in Loiter. How did you arrive at those Rate Roll/Pitch PID’s?
Update to latest Stable so this is logged properly:
INS_LOG_BAT_MASK,3 (change to 1)
INS_LOG_BAT_OPT,4
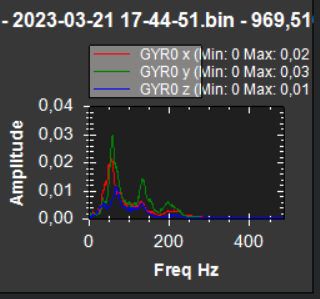
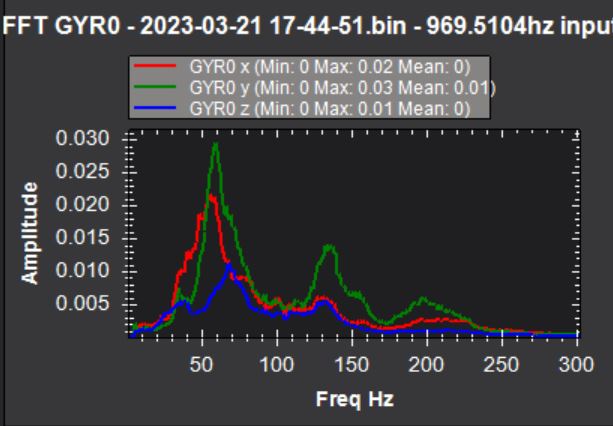
Notch center frequency looks like 58Hz to me. Nothing at 40Hz where you have it set.
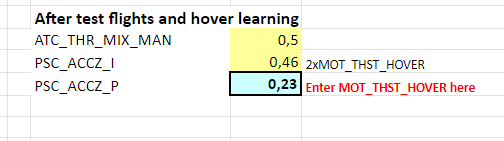
Thanks for responding, it’s a flight test over a large area far enough to cause damage. And the engine shutdown switch can be active. I reached these pids with initial parameters. Since hover learn is active, my hover parameter set itself to 0.228 and I changed the parameters in the image accordingly. Since I am using Navio 2, it shows this software as the latest update. What should I do with the 58 hz value?
![]()
did you mean this
…
Yes, and set the BW to 29Hz
I meant these. They are not Initial Parameters:
ATC_RAT_PIT_I,0.07517
ATC_RAT_PIT_P,0.07517
ATC_RAT_RLL_I,0.07517
ATC_RAT_RLL_P,0.07517
In the table I used, there was no situation related to these values. Could you please tell me what these values should be? And I would be very happy if you tell me where I should take as a reference.
did you get this value from this chart
This one. Looks like the same.
Default is .135 for those parameters. Usually you would start there and look for oscillation either from what you can see or in the log with the RCout channels. Then, if there is clear oscillation those values would be reduced. Maybe you already did that, I don’t know.
Doesn’t this value depend on propeller size or some other factor? I don’t remember where I read it but I know it should be lower for large drones. Is this info correct?
And can you deduce the current values from the video in the link I sent, low or high?
…
Not directly, no. You are probably confusing it with these:
ATC_ACCEL_P_MAX
ATC_ACCEL_R_MAX,
ATC_ACCEL_Y_MAX
No. Videos are not good for much when it comes to tuning. Set them (Rate PID’s) back to default and start over.
I see. Well, can you see any other problem other than pid in the logs as the cause of this crash?
For example, the number of satellites drops to 9 for a while.
That won’t make it wobble.
won’t gps problems cause toilet bowl movement?
No. Compass problems can.
You have a tuning problem. Suggestion for fixing it has been posted. What prompted the reduction in Rate P&I? Any logic to that?