this is my first post here Thank’s to all for support
I just build my first rover and now I’m doint the first setup. I calibrated the radio, and all seems ok. I armed the rover, green light, and the throttle goes perfect but steering did not response.
I connected steering at pin1 but turning the wheel did not response, any idea?
And another question, in manual mode it seems that the time when I push the throttle till the rover response has a little delay, is it normal?
regarding the tbrottle delay, look for the MOT_SLEWRATE parameter. I think since version 3.2, this setting is also used in manual mode to prevent damage to drivetrains etc. from too harsh throttle changes by the user.
Do you have an ackermann steering (car steering) or a skid steering (tank) rover? What kind of transmitter are you using? If it is an ackermann steering rover, does the steering servo get power? You have to connect a powersource to the servorail, it will not get power from the power module.
Thank’s for the throttle issue, I’m going to chage it
Relating the steer servo, This servo is powered directly from the pixhawk. Is this the reason because the servo did not work?
How Do I power it?, Did I solder a cable from power to energy servo? I’m using Futaba T3PV https://www.futabarc.com/systems/futk3200-3pv/index.html
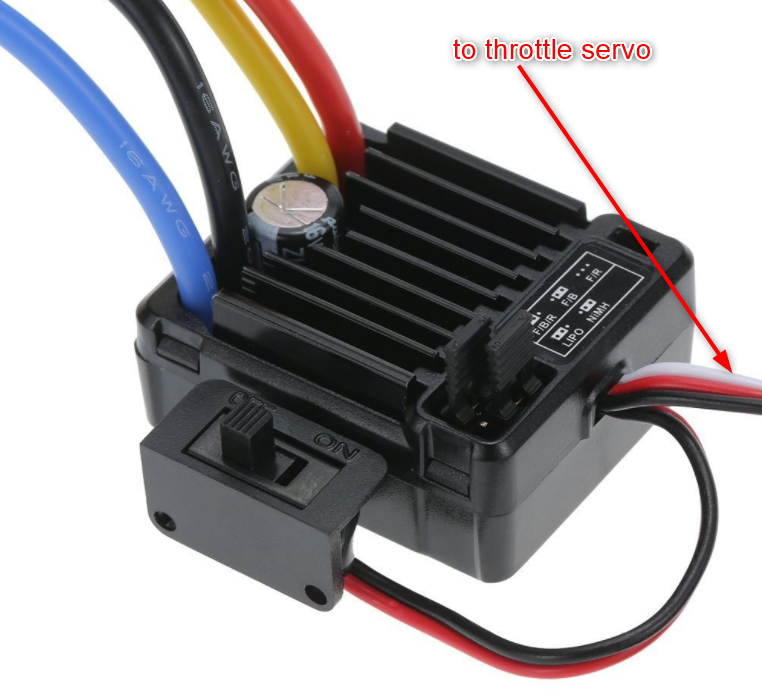
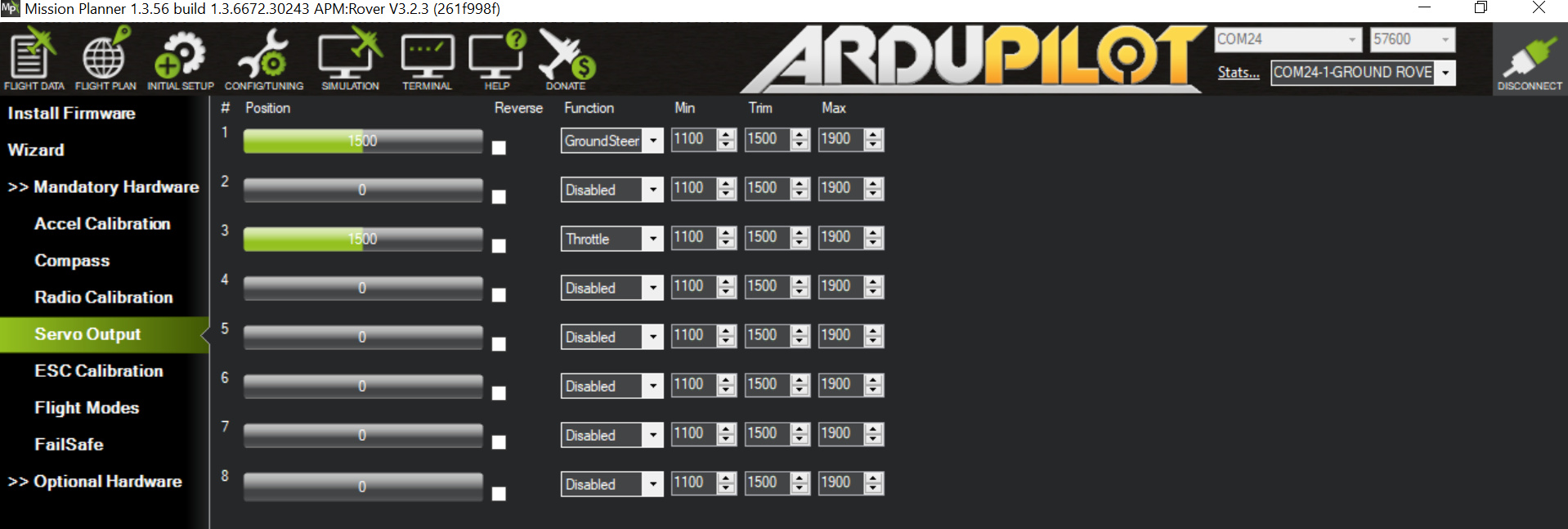
You will need a BEC (Battery Eliminator Circuit) connected to the servorail. Most car ESCs have a built in BEC. If you ESC has 3 wires (white, red, black) connected to the pixhawk servorail, it should have a BEC. Have a look at the manual of your car/ESC to be sure. If it has a BEC and the servo does not move, there might be something wrong with your configuration. Please post a screenshot of the “servo output” screen in MissionPlanner.
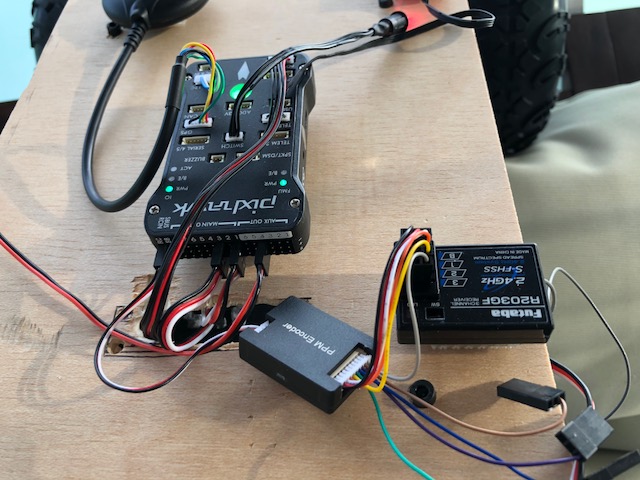
You do not need to solder anything. Did you use the car without the pixhawk before? If not, connect ESC and servo directly to the receiver and see if everything works.
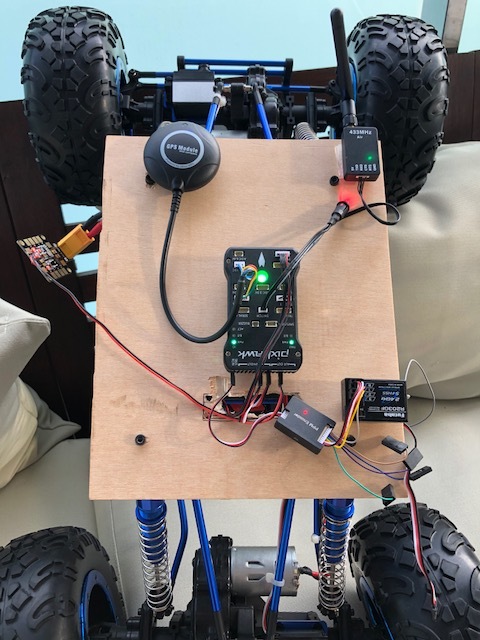
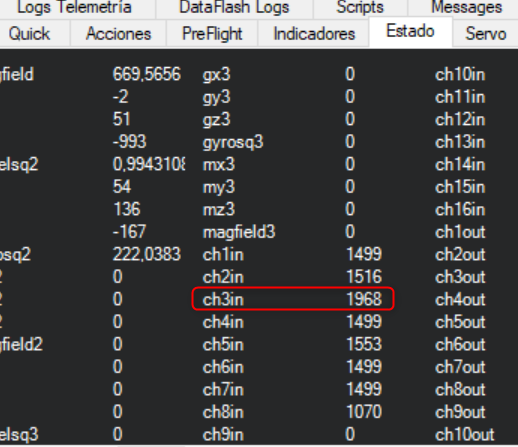
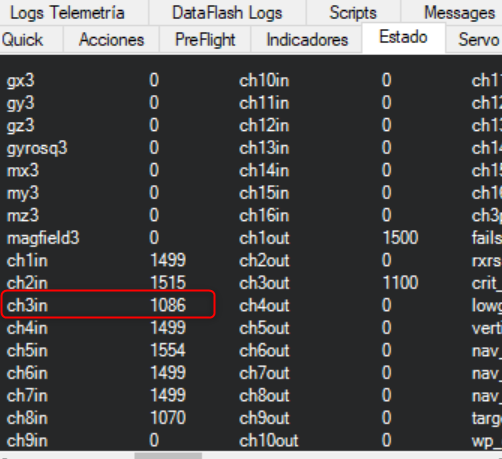
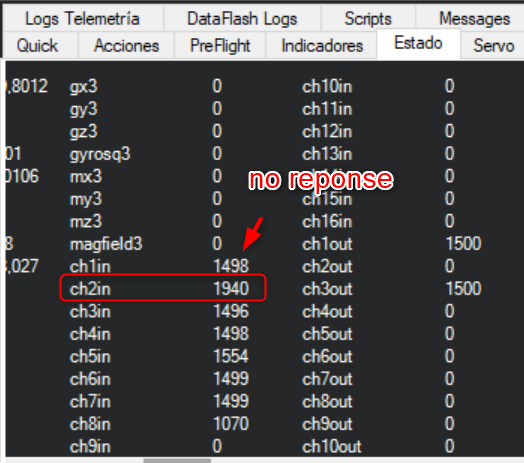
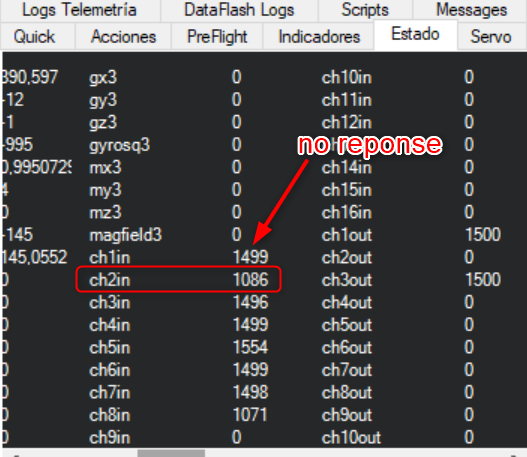
Hm. I can not spot anything wrong with your setup. Next thing I would look at is the status screen of MissionPlanner, especially the ch1/3 input and output values. Do they all change if you move the controls?
You have just found your problem. Default channel order for Ardupilot/rover is AETR, Aileron, Elevator, Throttle, Rudder. Every RC manufacturer sends the first 4 channels in a different order. You can now change the order in your TX to match the order ardurover expects or you can change the RCMAP parameters to match your TX or you switch around the channels going into your PPM encoder.
Ardurover takes the steering input from the roll channel, so if your steering input moves the roll channel in rc calibration, everything is alright. Since ardurover 3.2, input and output channels can be configured independently from each other, so you can leave your servo output setup as it is.