On a fairly long mission yesterday I witnessed some odd behavior I can’t explain from the log. At one point after a Waypoint it slowed down and stopped forward speed, started again and stopped. After a dozen of these events (witnessed via telemetry) I hit RTL and it stopped again and simply hovered for ~1.5 minutes until I tried Auto again. Same start-stop behavior after that so I flew it home in Loiter.
This is a Pixracer running the latest 4.1-0-Dev version. This craft has been rock solid for months now but I do update to the latest Dev often as it’s really a test vehicle. I would appreciate a review for some ideas for the problem which starts ~1030s.
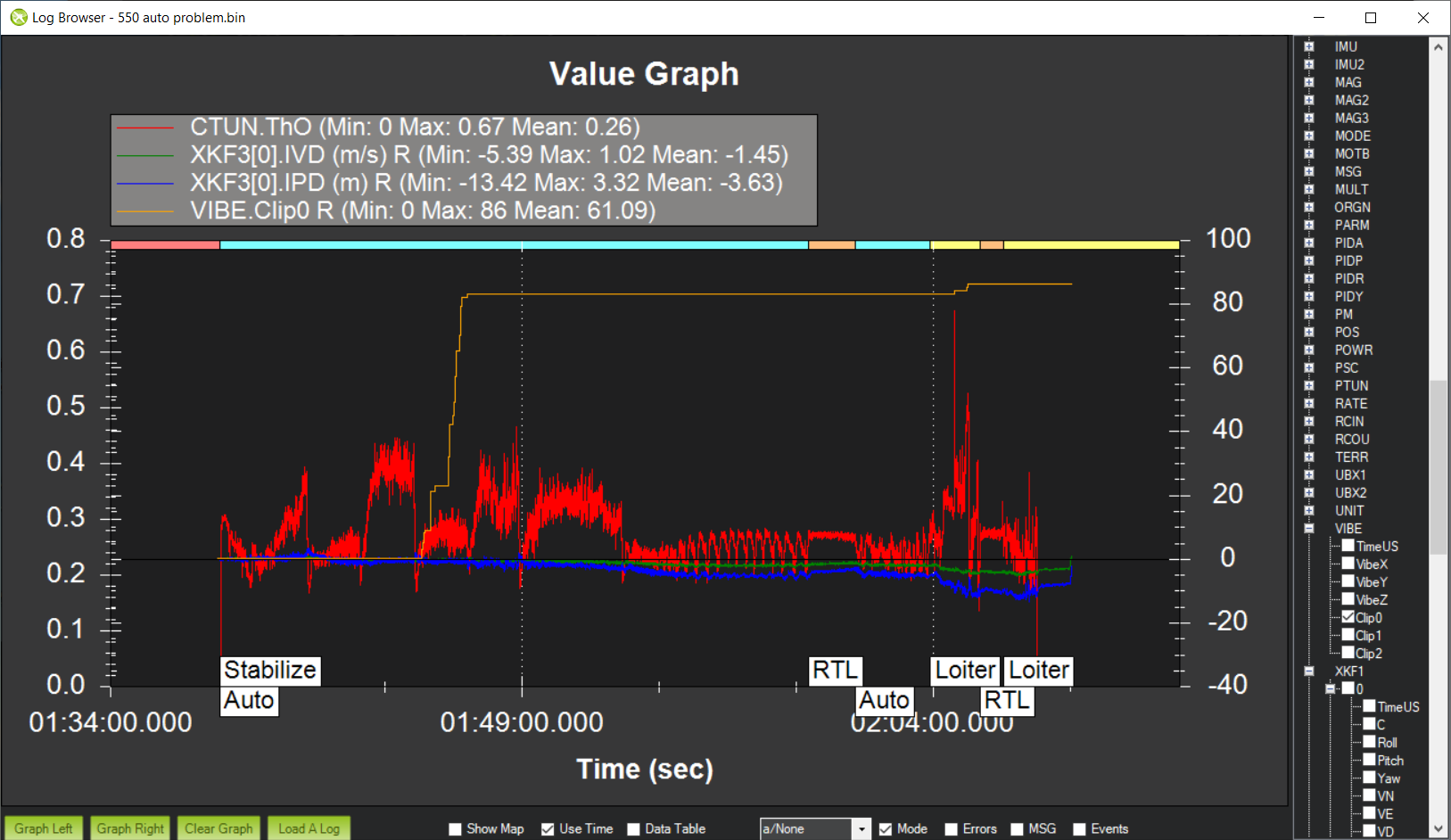
Thanks for the review Andy @andyp1per . Yes. Z-vibes are a bit of a problem on this craft but it hasn’t presented a problem until now. Also, the vibes that caused the clipping events happened much earlier in the flight and no more events happened after that as the clip count flat lined at ~80. So I guess I’m still puzzled why the velocity and position innovations during this time are bad. And no error messaging.
Looking in more detail at your review it does look like the Baro Innovation (IPD) is really bad as you say. Huh…
Related or not I also notice with this latest Dev version that on boot I get a “EKF attitude is bad” error that I haven’t seen before.
Right, no rangefinder. But perhaps it’s an altitude sensor problem in general. For some reason my Baro Innovations are bad. But its a new developement and as yet unexplained. I’ll be interested to review your log but traveling so next week.