I have a Pixhawk quad with latest 4.0.3 firmware. It is stable in a hover and I can move it around with gentle inputs but as soon as I give a too large input deflection it starts to wobble and then falls down. Please find link below to log file.
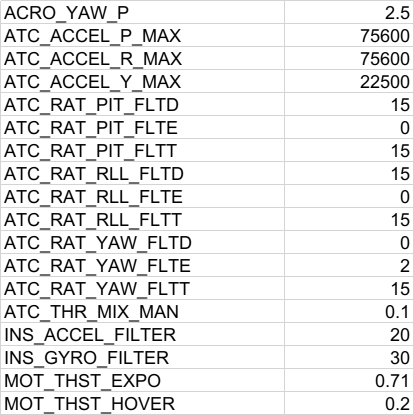
Yes I did follow the instructions on that page but I’ve only gone as far down as the “Initial Aircraft Tune” section for now and all flights flown were in Stab mode. I used CH6 to tune the Pitch/Roll Rate P values and after it wanted to flip on the first takeoff I lowered it and at around 0.1 it seemed to be flying “stable” and that’s where I left it. Here are my copter specs:
Which options did I miss? I know I still need to work on the battery settings because on this last flight the MP stated 4445mah was consumed but I only put 1910mah back in…
I don’t think anyone has heard from Simon Kirby in years and what development there was stopped a long time ago.Today it’s usually associated with the cheapest poor quality ESC’s like what comes in those All-in-one kits. You want either BLHeli_32 or Hobbywing (they make BLHeli_32 ESC’s also) IMO. At the very high voltage/current level there are other choices.
Would trying BLHeli16 on the F-20As be a complete waste of time then? I’ve managed to flash the latest v14.9 on all of them but I still need to solder them back into my quad.
@Dkemxr Indeed, however the latest BLHeli-Atmel is three years old as well and there is no significant difference between SimonK and BLHeli-Atmel, especially with the ESC’s that André has. Both firmware will do just fine.
Yes, I suppose you are right If it’s plain vanilla BLHeli. I have a quad with BLHeli_S firmware ESC’s and passthough works using the right Suite so a small advantage there just for configuration. Well, OK just to reverse the motors if required.