I am using a anaconda plane and a pixhawk cube black. When I am in stabilize mode and i perform pitch it is performing roll and in roll it is performing pitch. Any method on how to reverse this ?
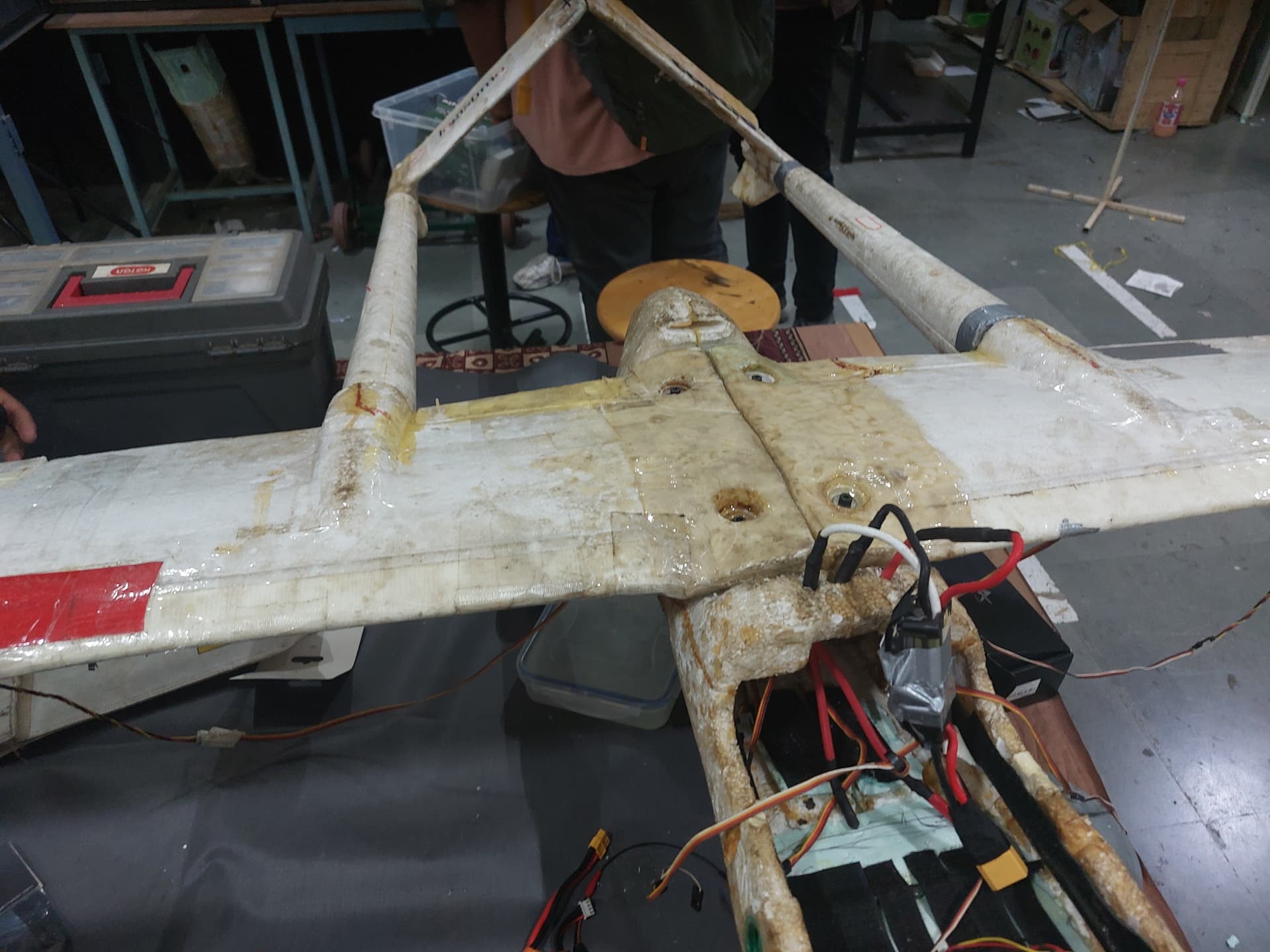
This is the plane i am using. It is a vtail
I am using a anaconda plane and a pixhawk cube black. When I am in stabilize mode and i perform pitch it is performing roll and in roll it is performing pitch. Any method on how to reverse this ?
When you say “When I am in stabilize mode and i perform pitch it is performing roll and in roll it is performing pitch” what precisely do you mean? Are you physically moving the aircraft and looking at how the autopilot is compensating, or are you using the RC transmitter sticks?
In general the SERVOx_FUNCTION options are used to tell Ardupilot which outputs correspond to which functionality and SERVOn_REVERSED tells Ardupilot which output channels to reverse to give the expected control surface deflection.
Have you looked at V-Tail Planes — Plane documentation ? (And technically what you have is an A-tail, not a V-tail.)
Thank you fot your help ![]()
![]()
![]()