OK, let’s try some changes to see if you can get past the “Failed to Level” in Auto Tune.
ATC_ANG_PIT_P,14
ATC_ANG_RLL_P,14
ATC_ANG_YAW_P,6
INS_ACCEL_FILTER,10
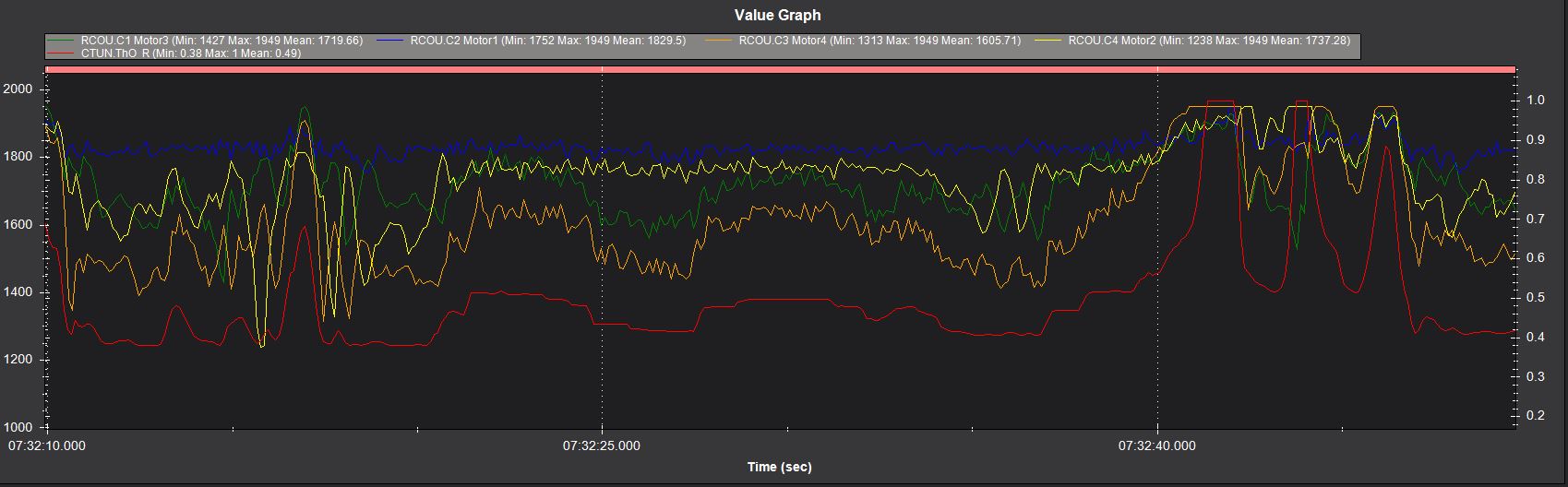
I would have built this for 4S power. At what looks like a hover (Tho ~.45) the average motor output (~1700us) is higher than desirable (low thrust/weight).
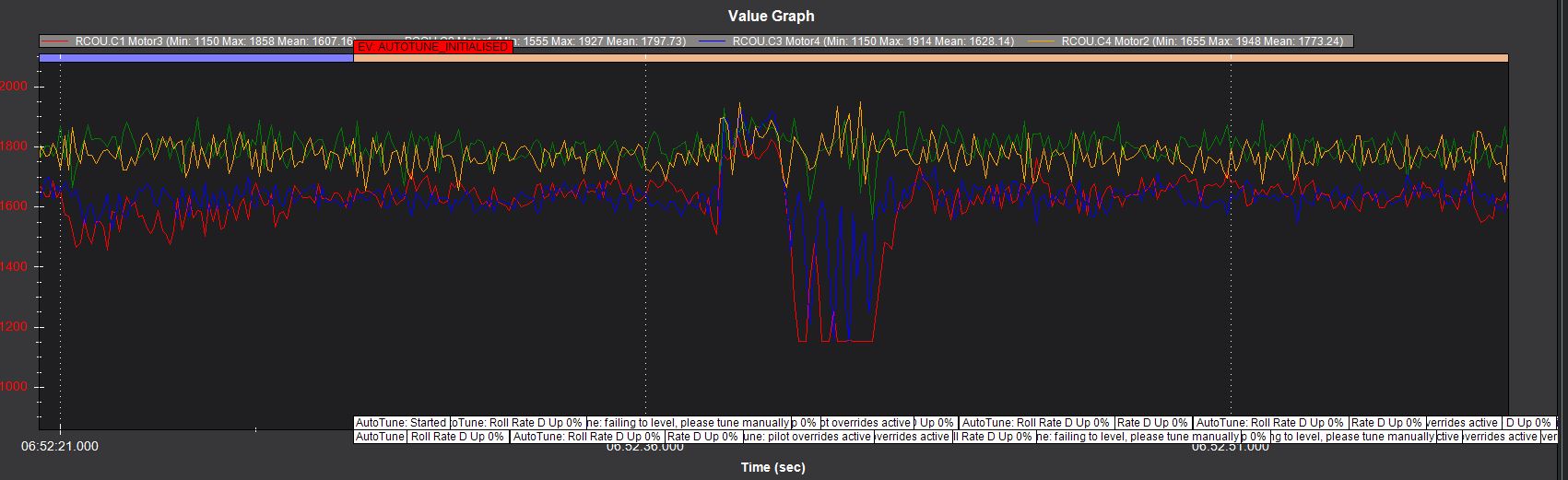
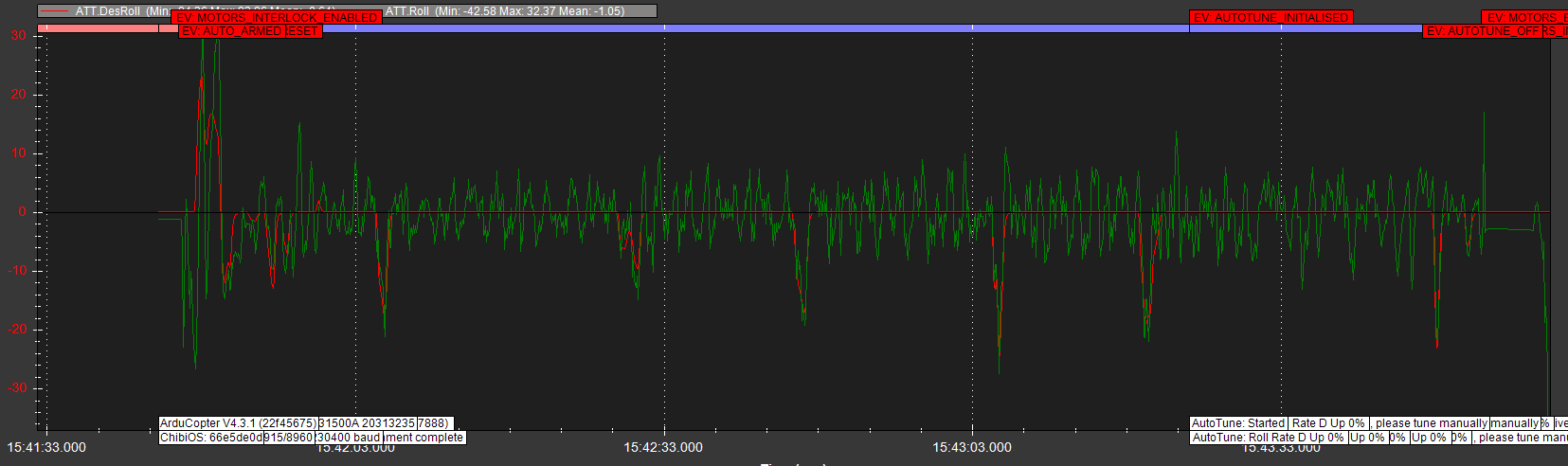
I tried the settings as suggested and no luck with the autotune (just tuning roll). It seemed to wobble more with the settings suggested:
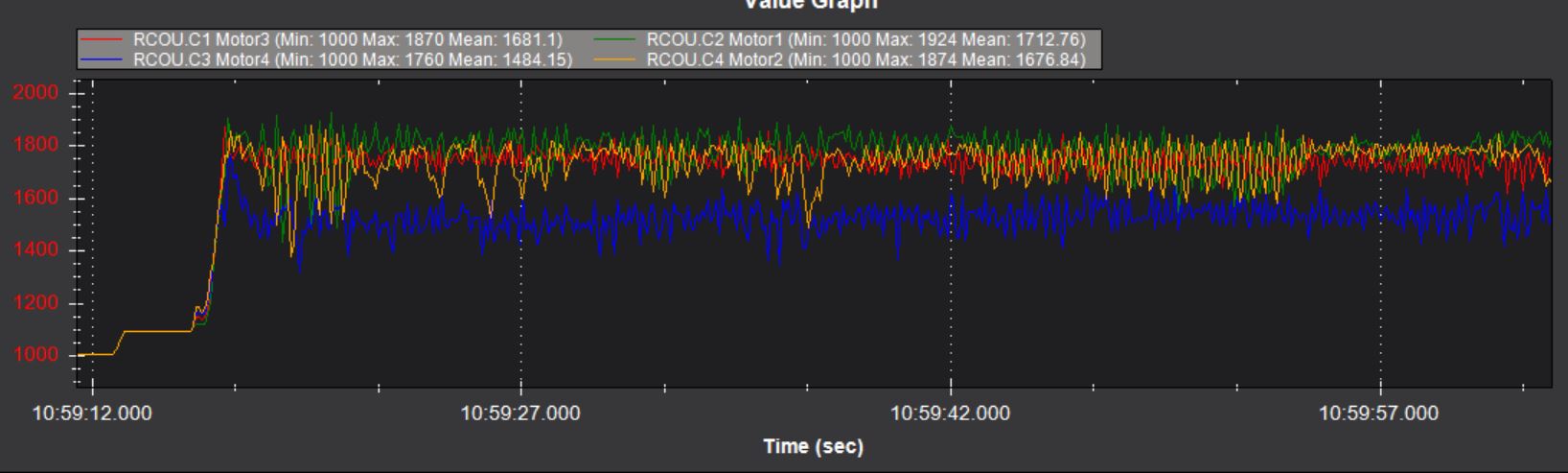
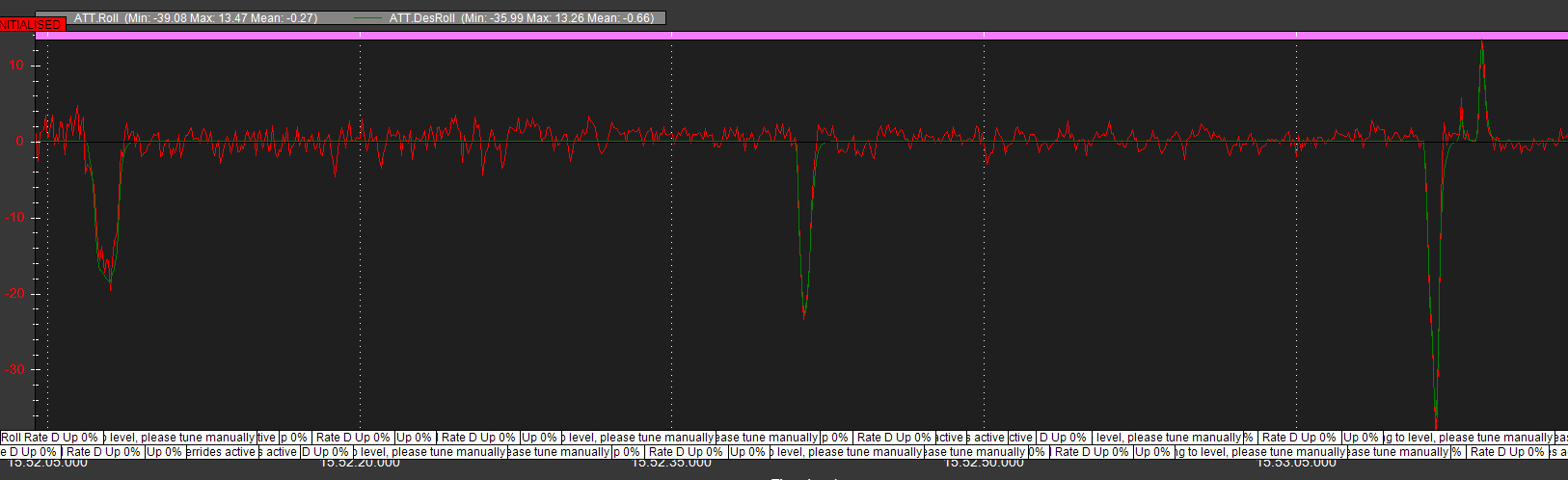
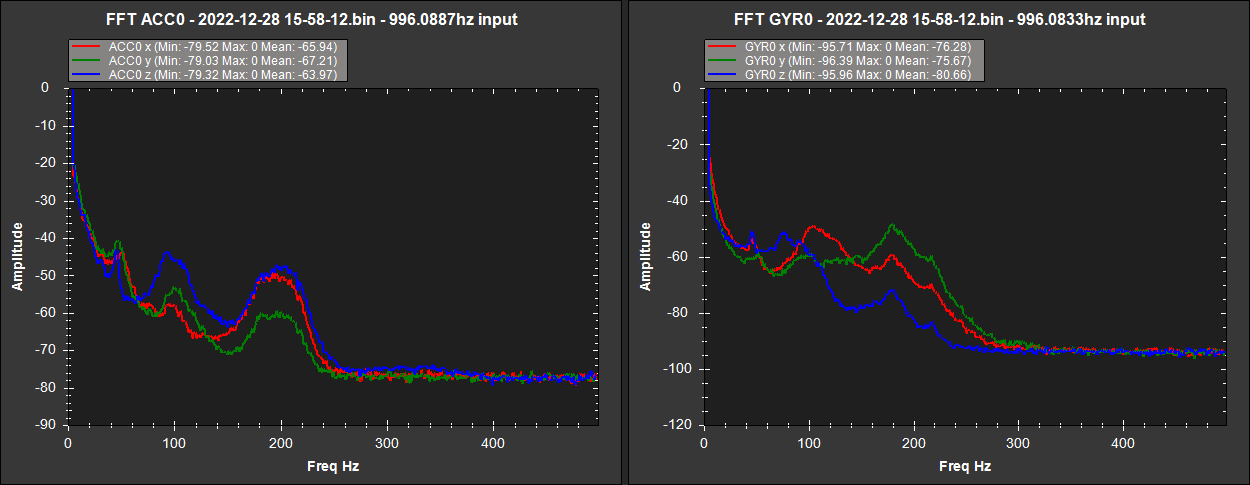
I tried disabling the notch filter and felt things got better although the autotune still gave “failed to level” messages. Here is the disabled notch filter attempt; sadly the battery ran out and it was too windy anyway to be honest.
I also tried halving the settings that you suggested, as well as using the suggested settings with INS_ACCEL_FILTER set to 5 and also 20. In all cases, it was still wobbly and would not autotune.
I’d be willing to retry the no-notch filter test with the suggested settings. What do you think? I would have thought having the notch filter would help.
Yes do that. Set INS_LOG_BAT_MASK to 1 and INS_LOG_OPT to 4 and make an AltHold Hover flight.
Also I think MOT_SPIN_MIN should be reduced as under demand your motors are bouncing off of minimum. Use Motor test to determine MOT_SPIN_ARM and set MIN a bit higher.
Set to 4 shows log data pre and post filter. W/o the Notch filter enabled it will only have the results of the standard low pass filter for post, its always present. That would be interesting to see.
That doesn’t sound good. When I see that problem I have replaced the motor. I guess lower it as far as you can with them running evenly in Motor Test.
Yea, I can appreciate that. There are some 4S LiPo form factors that are fat and short that might work.
I don’t agree, it’s underpowered/overweight. It’s clear from the average motor output at hover which is close to 1800us. This should be 1500us or below for proper stability control under all circumstances.
Set these for the Notch Filter:
INS_HNTCH_ATT,40
INS_HNTCH_BW,90
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,180
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.400
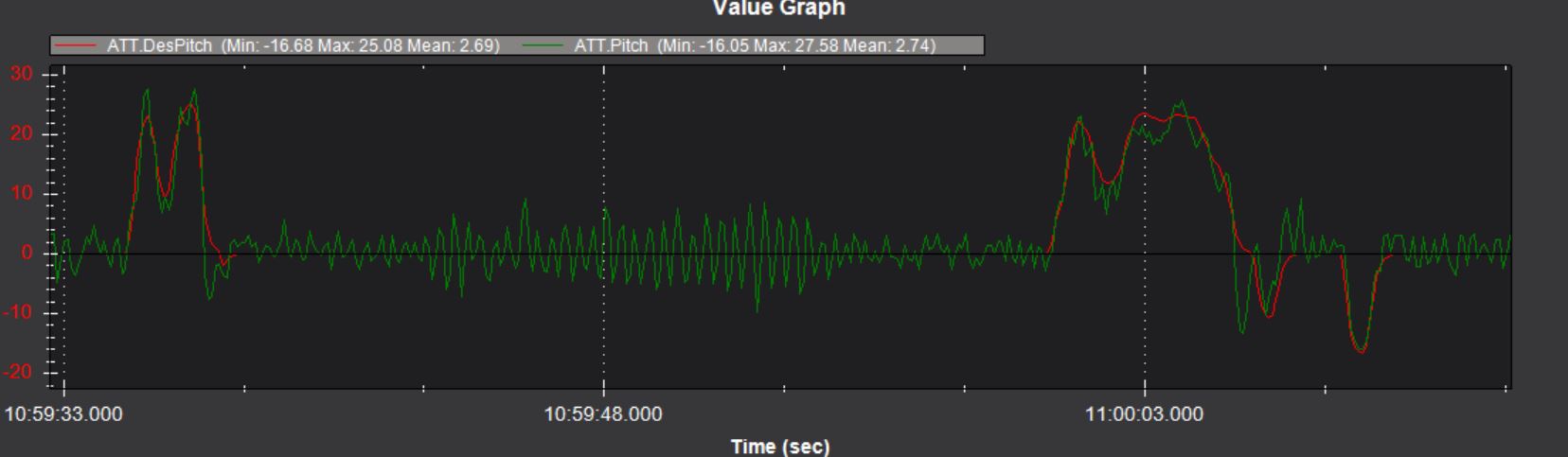
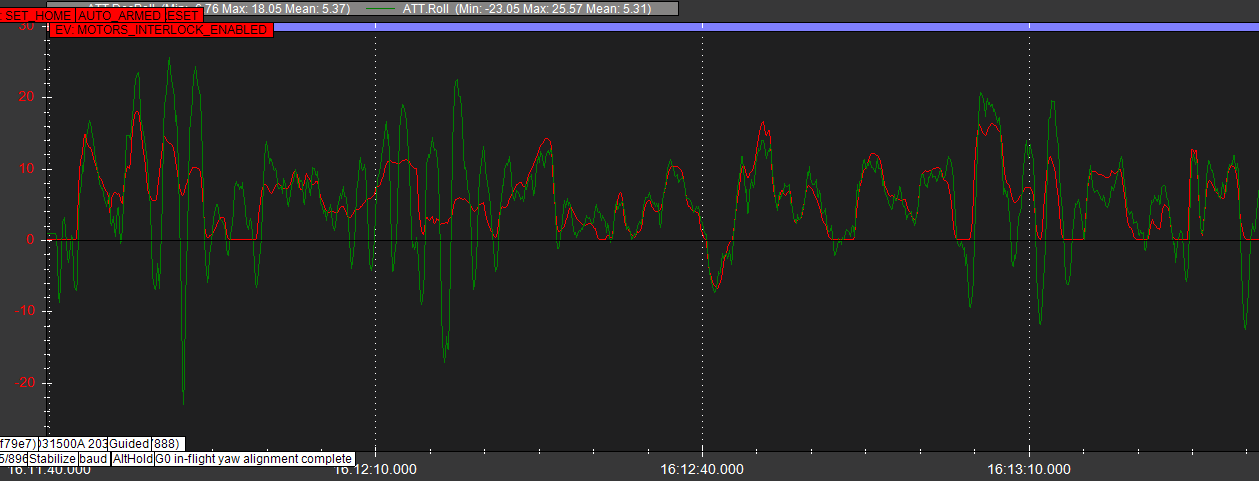
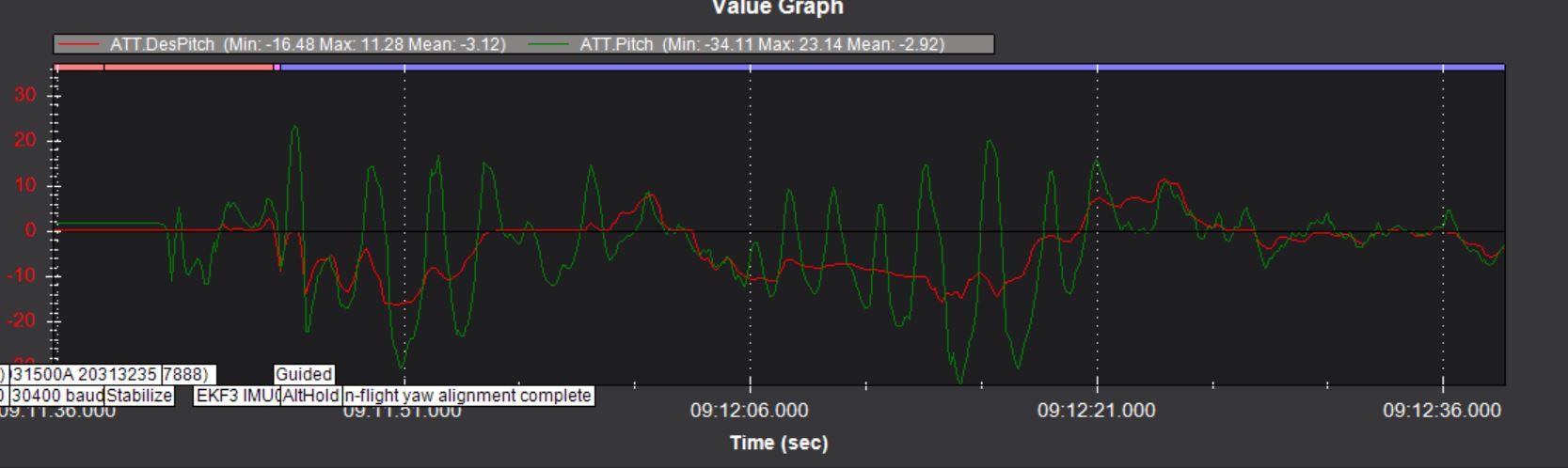
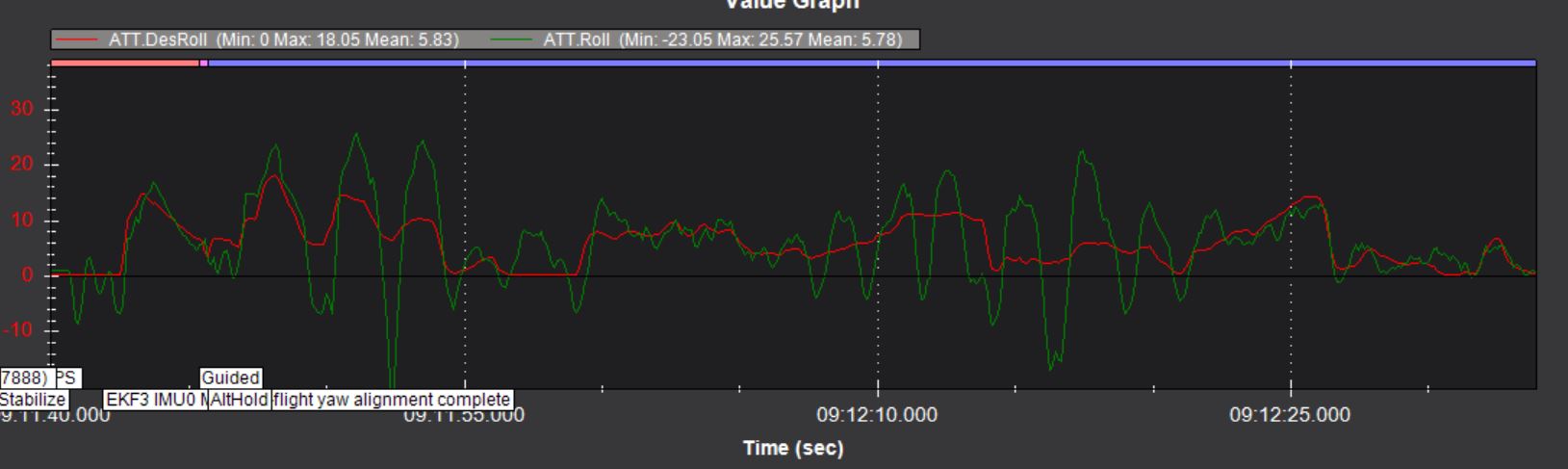
You can see the pitch and roll oscillation in the log. Try lowering the Rate P&I for both to .04 and see if it’s reduced. Here is an example:
No, not really. .04 clearly isn’t suitable You have chased these parameters all over the place and it still is not stable enough for an Autotune. I would suggest addressing the thrust/weight issue, rest all to default and start over. Or go to the Manual Tune Wiki page and work your way thru it using in-flight tuning. It’s time consuming but it’s how I usually do it.
I have read the manual tune pages before but it always talks about “oscillations” and “over corrections to inputs”.
My problem does not fit this description IMO because what I have is random perturbations, not lack of stability in the traditional control sense. I’ve watched tuning videos including Randy’s one on the wiki and the drone does not have these random disturbances.
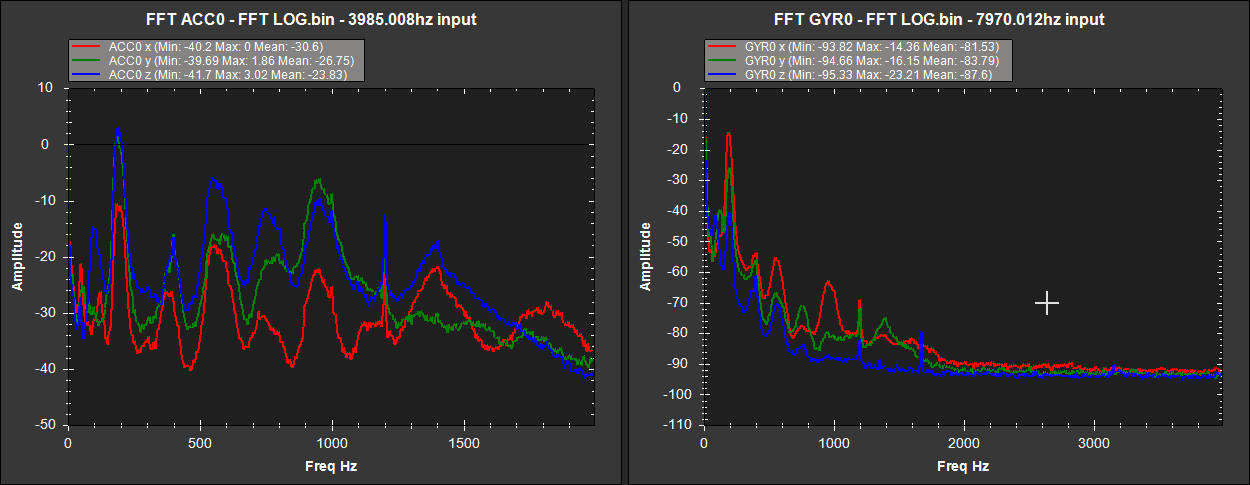
Given all your help, IMO, the issue is possibly related to aliasing of high frequency vibrations that affects the FC.
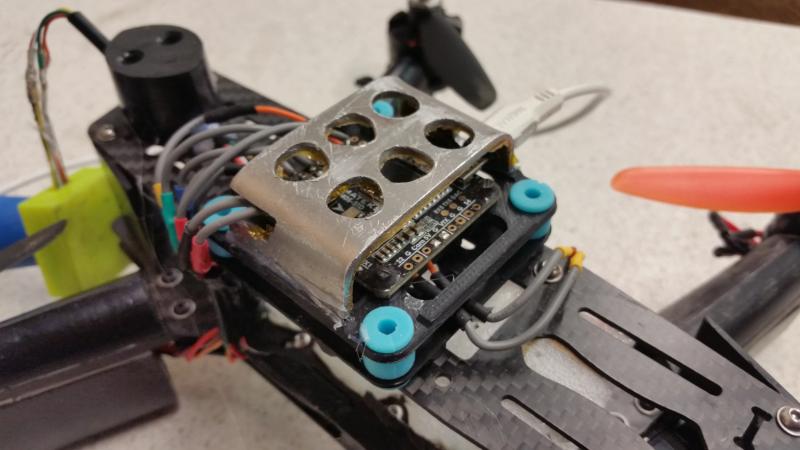
I have a 20g steel plate that is bent to shape to fit over the FC so I will glue that in place and see what results I get. Not ideal given the drone only weighs about 450g but such is life. It’s only a 5% increase and should dampen vibrations.
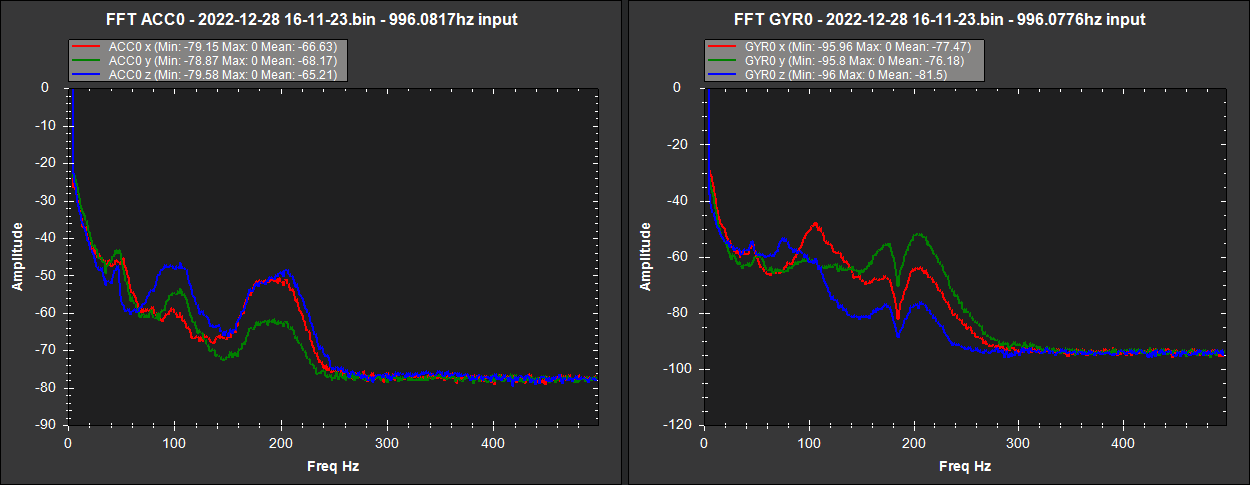
Note that these 2 post-filter tests were done in gusty wind conditions. I have not attempted auto-tune as it’s too windy, but the drone does seem to twitch less.
Until you improve the thrust/weight condition I think you will be challenged finding a good tune for this craft. At present there is both Pitch and Roll Oscillation:
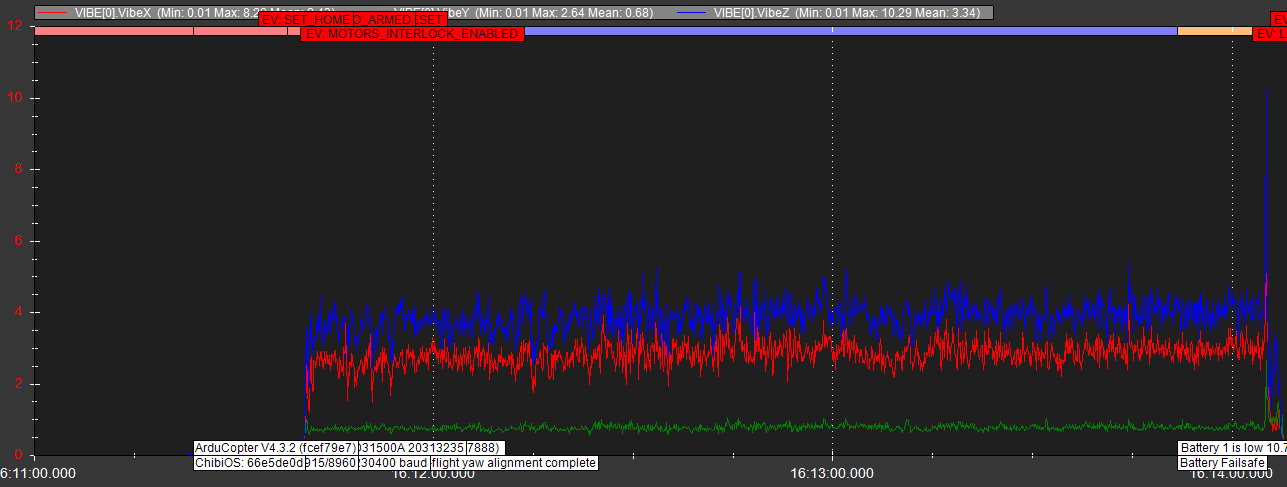
That weighted flight controller mount certainly knocked out the vibrations.
For filter-related stuff use these:
INS_ACCEL_FILTER,10
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_REF,0.28
INS_LOG_BAT_OPT,4 ← record pre and post filter, no need for separate flights
INS_HNTCH_REF,0.4657708 should be 0.28 or the HNOTCH will only work above hover throttle
The formula is
INS_HNTCH_REF = hover_thrust * (min_freq / hover_freq)^2
= 0.45 * (147/186)^2
I would try these PIDs and see how that goes with the improved filtering
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_RAT_RLL_P,0.10
ATC_RAT_RLL_I,0.10
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.10
ATC_RAT_PIT_I,0.10
ATC_RAT_PIT_D,0.005
As always be cautious, land immediately if stability is worse.
What motors and props do you have now? It’s a long thread not sure you mentioned it somewhere.
But by all means give Shawn’s suggestions a try. Looking back you have tried a wide range of parameter adjustments to little positive effect so more eyes on it can’t hurt.