The Flights
All flights were conducted early in the morning, before the wind had a chance to come up. All flights were flown in daylight, between 7am and 11am local time. The flights took place over 2 separate days, due to the limited flight time available before the wind began to pick up, and the number of valves that needed to be sprayed.
Two different approaches were tried during spraying. The first was to manually pilot the vehicle in ‘loiter’, while the second method used Mission Planner to generate a low altitude grid pattern over the areas in question. All of these flights used the barometer on the Pixhawk for altitude measurement, as our in house copter does not have a LIDAR altimeter or any other sensors.
The manual flights were chosen when the area to be sprayed had lots of obstacles in close proximity to the target area. For example, it was decided to fly the pond area manually, for several reasons. The main reason is that the pond actually sat below the ground level, and thus required the drone to fly below its ‘home’ level, in close proximity to an earthen wall, in order to sufficiently spray the shore of the pond. Several power lines ran around the pond perimeter, as well as a tractor parked near the shore of the pond.
During this flight a combination of FPV (first person view) cameras were used to position the drone and spray swath, as well as a visual observer. There are two cameras located on the drone; one facing forward out of the vehicle nose, and another facing down at the sprayer nozzle. A spotter was also utilized and was in visual and verbal contact with the pilot during the flight. During this flight, the drone was flown within approx. 2 feet of the earthen wall.

In the picture above, The vehicle takeoff point is market by the blue arrow. The vehicle was piloted to spray the water reeds first (green arrow). After the reeds had been sprayed, the farmer asked if we could spray the bank, which we then did on the same flight. The UAV was flown extremely low along the bank of the pond (red arrow). After the bank was sprayed, the vehicle was manually landed near the takeoff point (purple arrow).
The manual flight was able to obtain good coverage of the water reeds in the center of the pond as well as the weeds growing on the banks of the pond. According to the farmer, this area had been impossible to spray with any other method, as it was too dangerous to drive tractors near the soft earth edge, and the pond was too deep to wade into using a backpack sprayer. Coverage was confirmed visually via the downward facing camera, as well as on the flight logs generated by the Pixhawk.
The second area that was manually flown was a pair of irrigation valves near the road. Both of these valves were challenging due to the amount of debris surrounding them. Each of the valves had piles of old tires and large metal posts in the ground to protect them from being hit by trucks and tractors driving off of the road (apparently this had been an issue in the past!). To complicate things further, one of the valves sat directly under power lines!
Once again this flight was conducted using the two FPV cameras and a spotter, with the altitude held approx. 8 feet off the ground. Post flight inspection was much easier than at the pond, as the operator could simply walk right up to the valves and verify visually the spray pattern (red dye was added to the product before filling the tank). The flat area of the field, coupled with a lack of land marks for visual navigation, made it surprisingly difficult to find the second valve for spraying. The pilot flew the drone off track a bit before correcting and finding the second valve. Surprisingly, there were no observed issues with the drone operating under and in close proximity to the power lines.
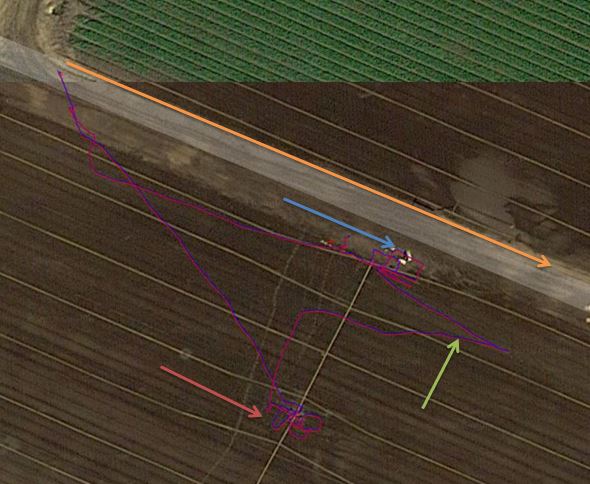
The debris around the valves can be seen in this satellite image above (blue arrow). The power lines (although not shown in the image) run parallel to the road (orange arrow). The pilot was temporarily disoriented by a lack of landmarks, and overflew the first valve while trying to find the second valve (green arrow). The second valve is marked by the red arrow. This flight took approximately 8 minutes.
Automated waypoint flights were used to spray several valves in a part of the field that had minimal obstructions and a clear line of sight from the operator to the vehicle. A grid pattern was planned using Mission Planner. We used the ‘Grid Options’ tab under the ‘survey grid’ to set the overlap, altitude, and speed of the drone during the flights. The flight plan had the vehicle flying at an altitude of 10 feet AGL (above ground level) at 2.5 mph, with a distance of approximately 6 feet between passes. The distance between passes was determined prior to arriving on site based on testing performed earlier at a different location. The barometer was used to sense the altitude on all the flights, and the automated flights had to be flown at 2.5 mph (~1m/s) in order to prevent the vehicle from losing altitude due to the aerodynamic effects in forward flight. I believe that a LIDAR altimeter would have been invaluable in this instance for increasing the spraying speed while maintaining the low altitude required to minimize drift.
From previous testing, the customer supplied ‘shower’ nozzle had a swath of approximately 8 feet. The entire area around the valve measured approximately 800 square feet (20 feet by 40 feet). The entire flight (including take-off and landing) took approximately 6 minutes, and the actual spraying of the valve area took approximately 3.5 minutes. Spraying the single valve used approximately 1/3 of a gallon, which is consistent with the flow rate measured through the nozzle earlier as well as the actual spraying time during the flight.

In the picture above, the valve is market with the blue arrow, the takeoff and landing point is market with a red arrow. The distance between the takeoff point and the valve is 250 yards (~228m, length of the orange arrow).
Once it had been proven that the equipment was capable of performing a spray pattern on a single valve at a very low altitude, the team decided, based on the battery usage and payload capacity, to begin spraying multiple valves in a single flight. To spray multiple valves, the team would first plan a normal mission of a single valve and execute the flight plan as stated in the example above. While the pilot watched the vehicle during spraying, the other team member would plan a different mission on an adjacent valve. When the drone was finished spraying the first valve, the pilot would manually take control of the vehicle while the other team member loaded the new flight plan to the drone while it was still in the air. Once the new flight plan was uploaded, the drone was set to auto mode to spray the next valve in the series.

The first valve spray pattern (blue arrow) was uploaded to the drone before takeoff, while the second valve spray pattern (red arrow) was uploaded to the drone while it was in the air. The takeoff and landing point was the same as the previous flight (green arrow). If you look closely, you can see the first valve that was sprayed (near the blue arrow) near the irrigation ditch. The entire flight to spray two valves (including take-off and landing, as well as upload of an additional mission mid-flight), took 10 minutes, dispensed 2/3 of a gallon of liquid and used approximately 40% of the battery capacity.
The last example involved spraying a drainage ditch on the north end of the property. In this instance, the drone was programmed to fly several overlapping passes at roughly 2 ft AGL (basically the same level as the ground, but centered above the ditch). The speed and sprayer parameters were the same as the previous flights. The ditch was actually one of the more challenging flights because the ditch did not have a constant width. The ditch actually tapered by several feet over its length, which necessitated the use of multiple passes at the beginning of the ditch, while towards the end of the ditch a single pass was sufficient to cover the entire width. At the end of this flight the drone was manually flown to the launch point due to an oncoming tractor which had no intention of stopping for the drone (indeed, that was one of the criteria that the farmer laid out; in no way would our spraying and flying interfere with the daily operations of the farm).