Greetings to all. I’m new here. I’m assembling my mini agricultural drone. The fact is that I want my drone to:
was autonomous
he himself would start spraying fertilizers, and if they ran out, then he himself would return home.
also if you refill the fertilizer again, then the mission would continue from the very place where it stopped
and if the battery runs out, then replacing it would continue the mission.
I am not strong in this, and I do not understand English well, since I come from Lithuania. But if someone understands this and collected similar devices, I will be very grateful for useful information.
I use:
pixhawk 4 radiolink controller
flysky i6s control equipment
water sensor, this is YF-401 water flow sensor.
Water pump 12v.
pwm relay will also come to me soon
But, for point 1, this is your bible: ArduPilot Copter — Copter documentation, read it carefuly, specialy the instructions on first time setup. Concentrate on building a simple drone first, make a good job on tuning and then you can proceed with the rest of the items, they are simply payloads and you can perform an incremental project on it.
Just a few comments about your components:
Maybe this component will be easily clogged…
These kind of water pumps are heavy and you will have some extra working on controlling it via Flight Controller, try to look for BLDC pumps which have ESCs, they can be more easily integrated and are more suited to the application.
First, you’re gonna need to build a very well tuned copter to be able to fly autonomously with a payload.
You’ll have to implement this custom logic. The YF-401 can help you here: when it stops counting pulses, it means that the copter run out of product, then change mode to RTL. A Lua script is the easiest way to do that, if your flight controller is able to run it.
You’re also gonna need to create the flight path to cover a field and spray it. Mission planner can help you with this task. The YF-401 can do the job for products with the similar density and viscosity as water. But it will be a huge pain for different products.
You write “Pixhawk 4 Radiolink”. It is either a Pixhawk 2.4.8 from Radiolink, or a Pixhawk 4 from Holybro. I guess, you have a Pixhawk 2.4.8. The LUA scripting capabilities of this flightcontroller might be limited.
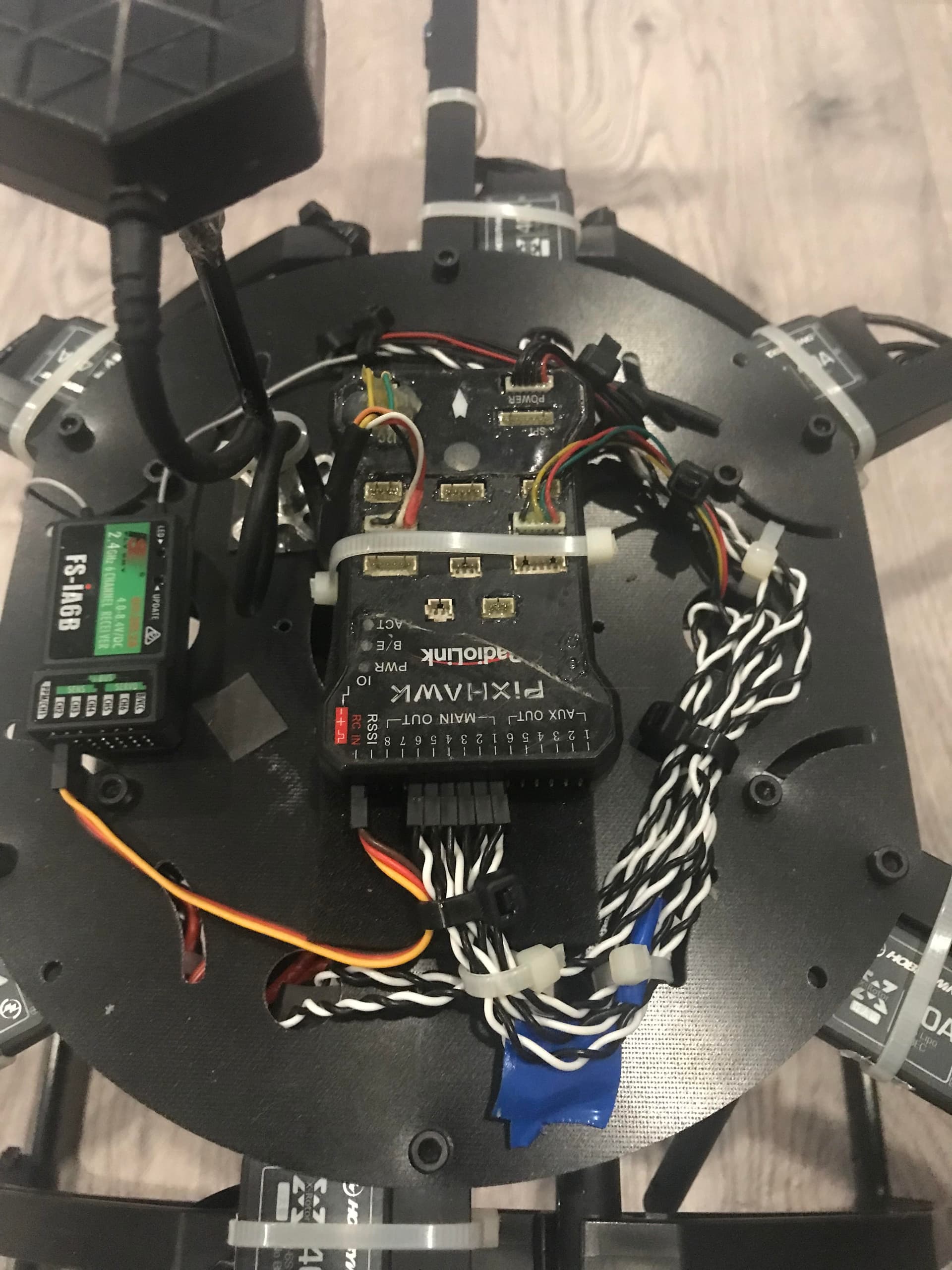
Thanks guys for taking the time to reply. I am attaching a photo of my drone for this task. I also understand that this is a difficult project, but still I want to get as close to the goal as possible. Also, according to my calculations, the drone will lift about 10 kg as much as possible, but this weight will never be here. Maximum about 6 kg. Motors br4114 400kv.
That is a Pixhawk 1, and I think vibrations will be a major problem since the motor/ESC and RC wires are cable tied in a bunch very close to the flight controller, and the flight controller itself seems to be cable tied to the base plate.
The flight controller will need some sort of antivibration mounting.
Probably fit washers or something under those bolts that secure the arm-folding mechanism, to ensure they tighten down properly on those slotted sections and dont slip.
Can the ESCs mount inboard and the motor wires run along inside the arms?
The base plates seem distorted by the bolts, I would doubt it will be strong enough to last carrying your payload for any length of time, or very many flights.