Thanks @xfacta , but I think we have a little misunderstanding. I do not want to add any extra waypoints. I want to keep it as-is.
What I want to change is how the ardupilot software computes spline paths. I should clarify a few things:
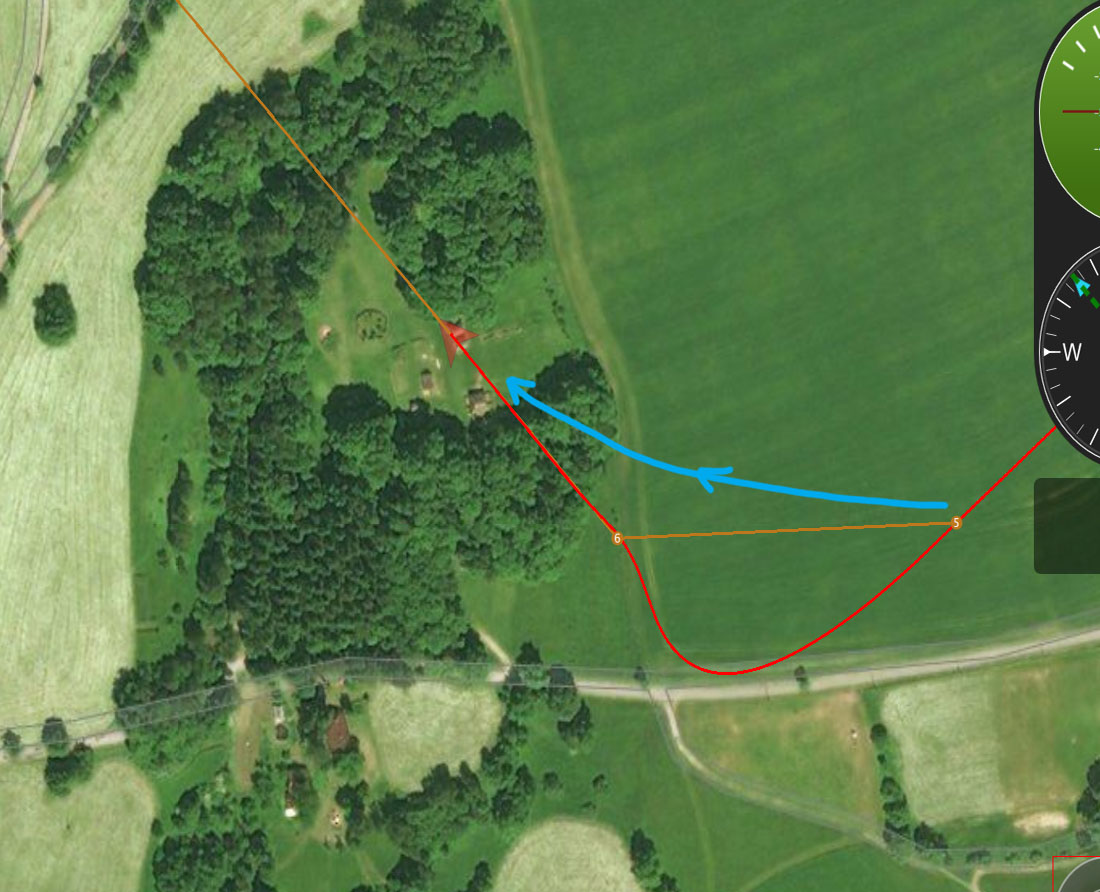
The point #5 is a basic waypoint, #6 is a spline waypoint, and #7 is again a basic waypoint
My real pixhawk-ardupilot-powered quadcopter flies the path correctly in the inner area between points 5 and 6. This is marked with the blue line.
My ardupilot simulation (SITL), which should be perfect emulator of ArduCopter behavior, flies the same mission on the red path. It is somehow trying to outfly the #6 point on the outer side. And that I think it is incorrect.
So I would like to know what arducopter parameter affects this computation, this behavior how the spline waypoints paths/patterns are made.
Or maybe an explanation why there is a difference between SITL and my real quad running essentially the same software.
I don’t have a full answer but if you’re seeing a difference in behaviour on the real vehicle vs the simulator then it might be because the vehicle is running Copter-4.0.x while the simulator is running 4.1? MP’s simulator at least uses “latest”.