Hello, I am using ArduCopter and QGroundControl for my mission planning. I am trying to set a Spline Waypoint between two Waypoints. I noticed my multirotor and my SITL (ardupilot simulator) fly the same exact route on a different path in the mentioned spline waypoint.
Do you know what controls this behavior and how can I adjust the turn types?
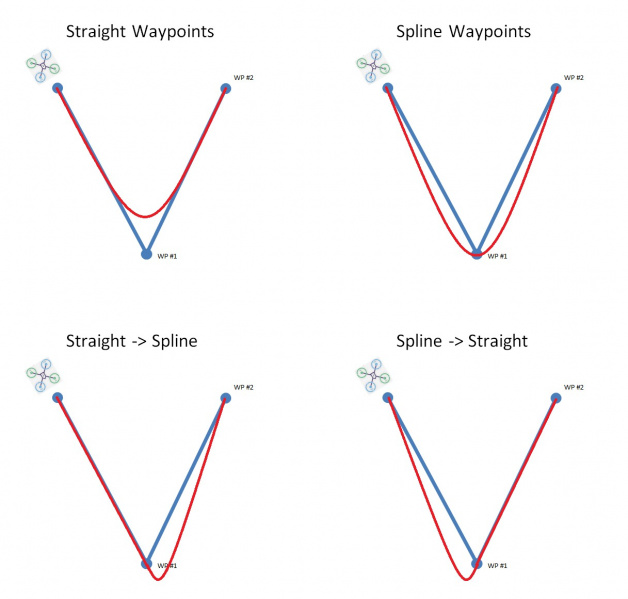
Online I found only this source, which nicely and graphically explains the difference.
https://wiki.ugcs.com/Waypoint_turn_types_(Ardupilot/Pixhawk)