well question is simply -
why does QGroundControl not support Spline_Waypoint ?
or did I miss something - but a mission file from mission planner with spline waypoints is somehow a straight line in qgroundcontrol…
cheers Patrick
well question is simply -
why does QGroundControl not support Spline_Waypoint ?
or did I miss something - but a mission file from mission planner with spline waypoints is somehow a straight line in qgroundcontrol…
cheers Patrick
QGroundControl does not display the spline waypoint path. It only shows point to point path.
so if I use a notebook in the filed, I should go for mission planner to use spline waypoints?
–> Traditional Helicopter Mission
BTW:
do you have an examplary mission file I can look at?
It will actually fly the spline just fine no matter what GCS you use. You can use QGC on a tablet in the field and no problem. You can set spline waypoints with QGC too, it just doesn’t show them on the screen as being spline.
I have many mission files - hundreds of them. They are not in this computer. When I get home this evening I will post one you can look at.
Edit:
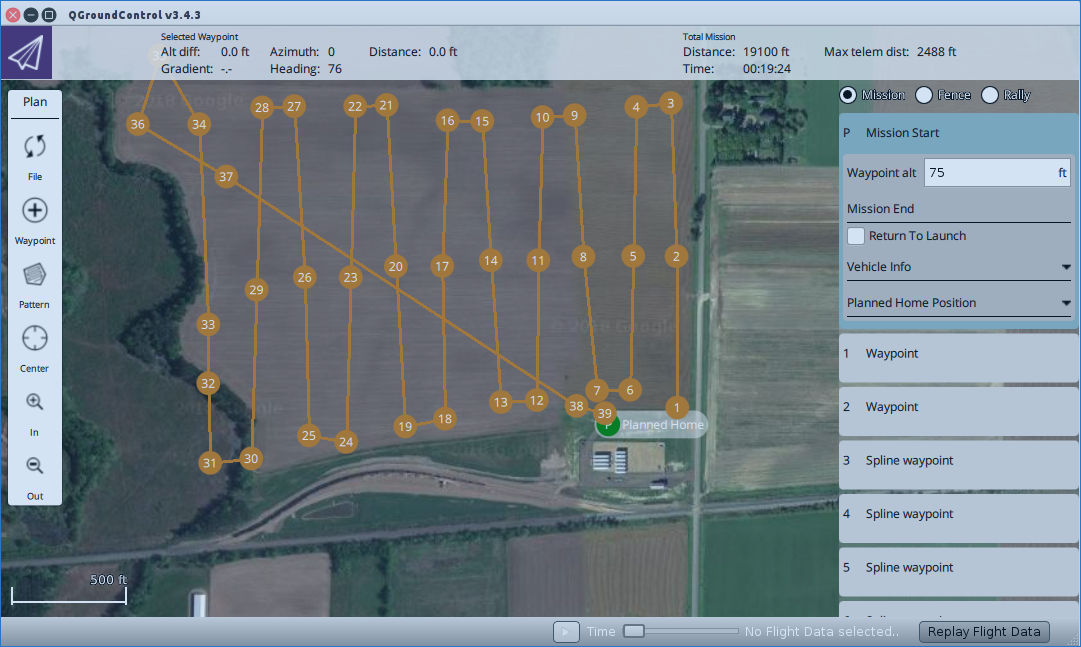
Hah! I found my tablet uploads these to my google drive. Check out the one I have linked to here - this should load with Mission Planner so you can look at how splines are arranged. Then load it in QGC (from the controller) and you can see how it looks in QGC. It should be a 75’ AGL survey flight.
https://drive.google.com/open?id=1zogl-7j7BaNYn-N4Yg4Lma-8k7ZFjOqu
ok sounds great. I am just wondering how I should start:
if I plan everything, there is “home” and then the first waypoint followed by the others…
I want to start in stabilize and then switch to auto, starting with first reasonable waypoint.
I also want to start with small speed settings. if everything goes fine, increase them step by step.
For that I would set the first waypoint as DO CHANGE SPEED…
followed by spline_waypoints, correct?
Check out the link I posted above. I like to start out in stabilize and take off and make sure the helicopter is flying ok. Then I flip to Auto and let it go. I set up my channel 6 option to tune WPNAV_SPEED with a knob. Set the lower end to 500, and the upper end to as fast as you want to go. Start the flight with the knob turned all the way down and it will fly at 5 m/s. Turn the knob up gradually and it will increase speed as you turn it up. If you want to slow down, turn the knob down. I have found this is much better than using DO_SET_SPEED in the flight plan.
Thanks again, you’re great!
well your file works in missionplanner, but I would not trust in QGroudncontrol…

Wow. That is strange. I still have QGC 3.4.3 in this computer (Linux) but it loads fine here, directly from the file.
I won’t take that risk and stick to missionplanner for now…
I am limited to windows right now -
nevertheless - for tuning puposes qgcs is fine
Spline waypoint test today was successfull!
And the idea with the knob for wpnav speed is great. Worked like a charm 
im off out to try waypoint speed on a slidder