So I’ve finished building a 3" drone equipped with Matek H743 slim, hereflow, range sensor and a GM10 flywoo nano GPS w/ compass.
I followed amilcarlucas amazing guide on how to tune it, I reached a point where I need to test it in stabilize mode.
So I slapped the batteries on and I took off, but it spins to the right everytime, it’s impossible to fly, on every takeoff it just keeps spinning to the right, starts slow then goes a little faster.
I thought it was the compass so I did a motor/compass calibration (the one which you need when you have vibrations), calibrated the compass, put it on a little mast but nothing seems to help.
Yesterday it flew once but today it’s not really working.
I tried looking into the log file but I really have no idea where or what to look at, could anyone help please? 3 01-1-1980 2-00-00 AM.bin (1004 KB)
You’ve disabled arming checks. (don’t do that, it’s only asking for trouble)
There’s no GPS lock.
If you moved the compass to put it on a mast, you will need to re-calibrate it. The compass is getting a lot of interference so that’s not helping. You might need to try in a different location.
I’m flying indoor so there’s no GPS, I even disconnected it as it’s not needed I only need the compass.
I re-calibrated the compass, the drone is tiny so I’m not sure if i can get it any further, it’s kinda hard mounted could that be the reason?
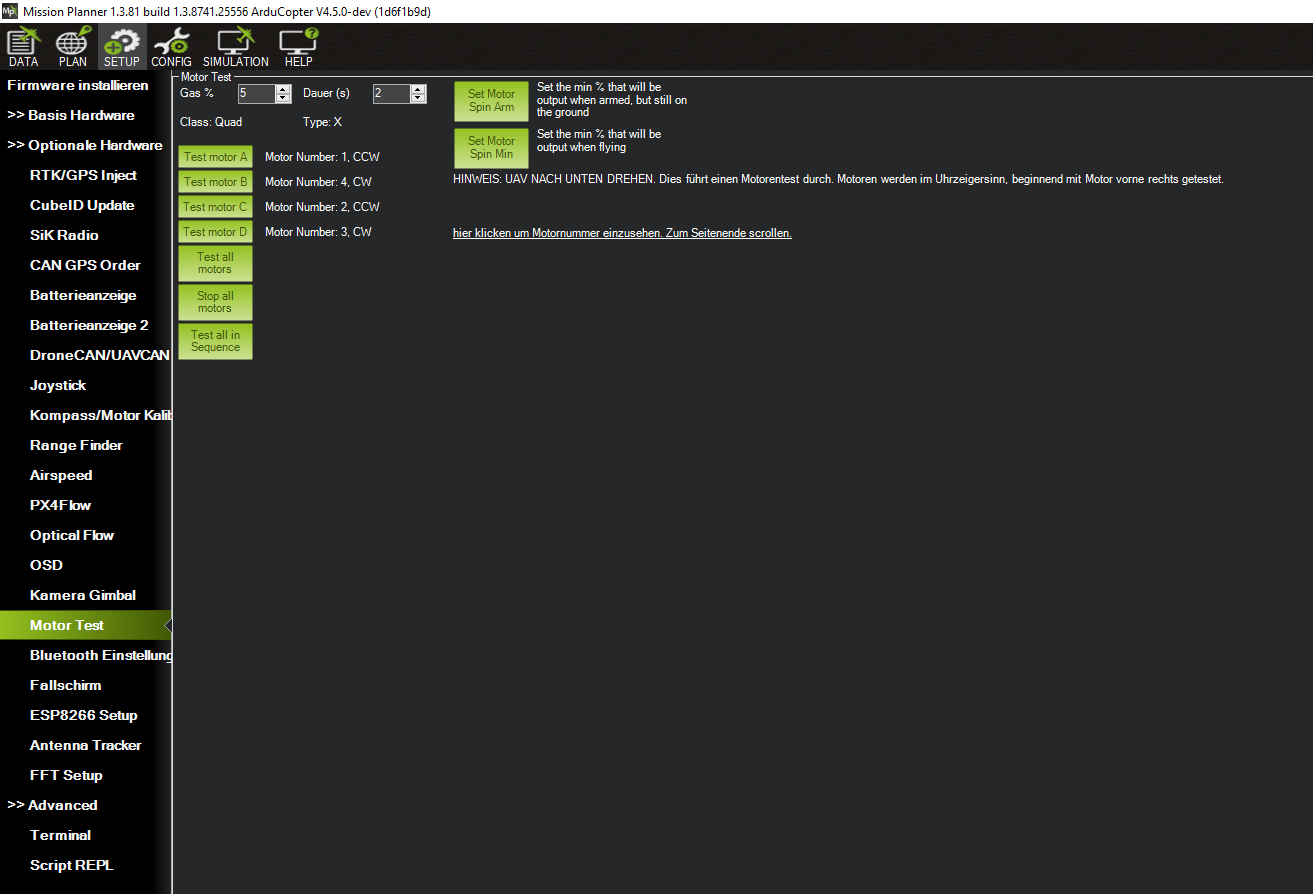
Hi what esc are you using is it a 4 in 1 connected the way they mark it if so try going to frame type and setting it to Beta Flight X hope this solves your problem good flying
Jan,when I built my tay can I had the 4 in 1 esc wired for betaflight,but the motor directions were all correct eg front left one was anti clockwise and back left one clockwise and it id not try and flip but controls were wrong and im sure it wanted to rotate
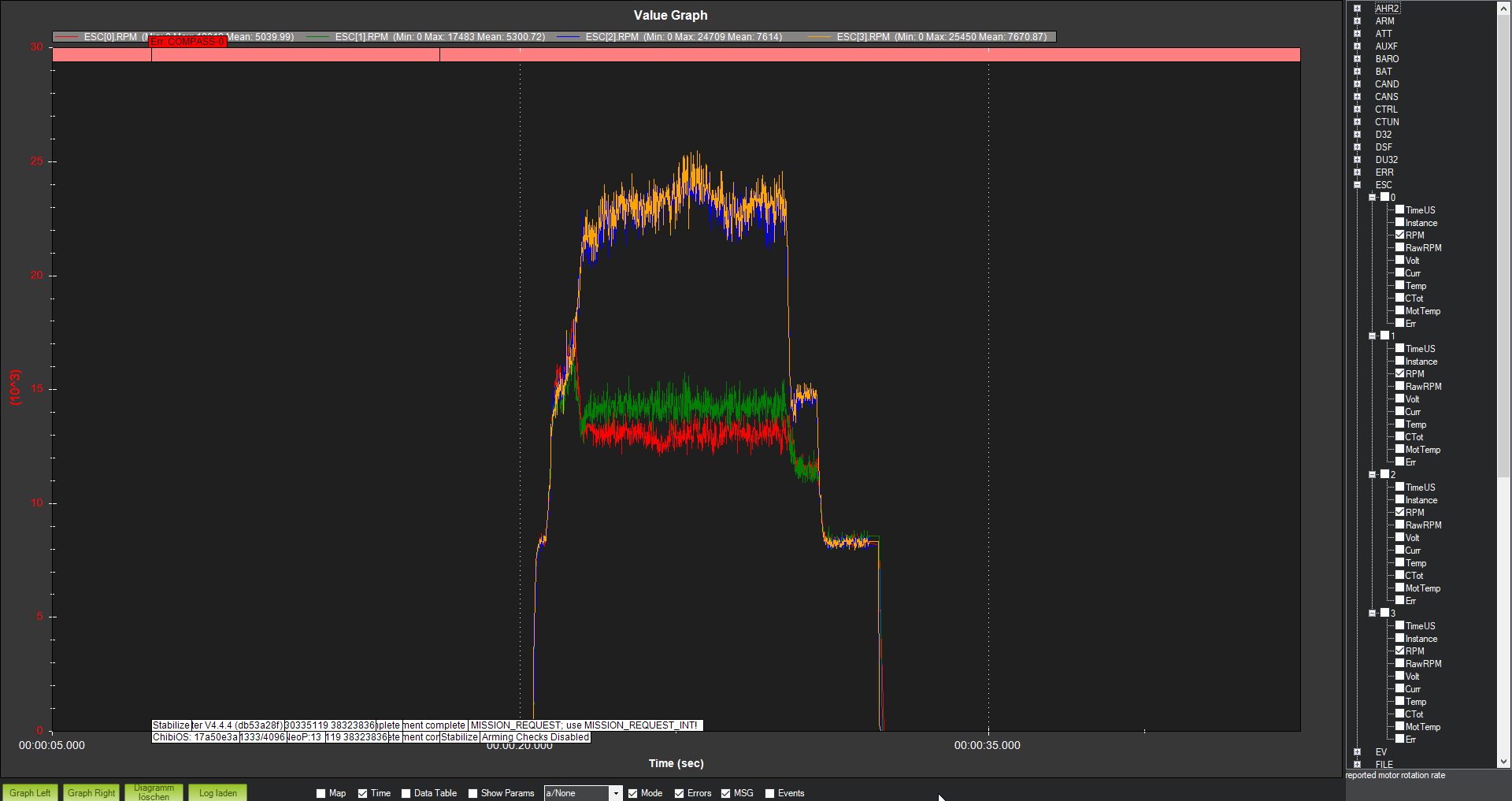
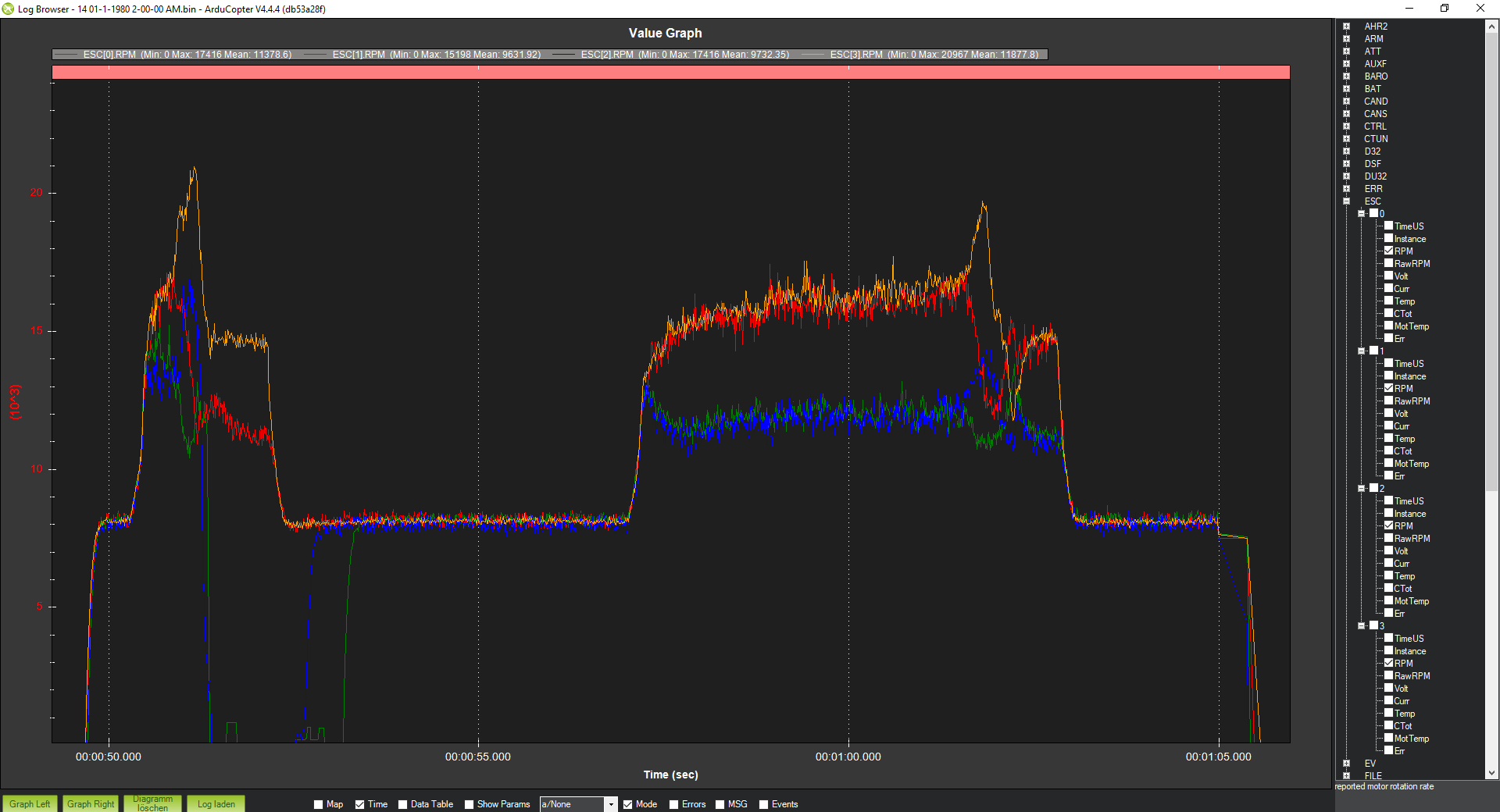
This time motor 1 and 4 were spinning higher than 2 and 3. In the betaflight configuration motors 1 and 4 are again the two CW spinning motors, meaning the FC tried to balance a yaw to the right. In the default configuration motors 1 and 4 are on the same side though, so this time it tried to flip.
If all motors are spinning the wrong way, try ‘Quad H’ (FRAME_TYPE = 3).
If all motors are spinning the correct way, you have a physical problem, i.e. that the motors are not mounted in one plane but are skewed relative to another.
[Edit] looking at the now included pictures, Quad X is definitely correct
I know it’s not clear sorry I tried my best drawing it
It’s printed with PLA+, I added additional motor mounts to keep the blades from hitting any of the components, so the only thing to try right now is either removing or replacing the motor mounts right?
What I really still don’t understand is how it did manage to fly smoothly yesterday for like 3-4 minutes, maybe having PLA+ frame makes it inconsistent?