This quadcopter was running OK for weeks.
Had a couple crashes.
Recently, had to reduce the Pitch/Roll from default 1.5 to 1.09 to reduce wobbling.
Then 1 day, 1 motor beeping and not spinning up at same time as others.
Trying to take off wild wobbling, and high throttle even when I have stick down. - > another crash.
Suspected problem with loose ESC signal/ground. Swapped motors. No more motor beeping. Soldered the signal/ground to pins on APM. Problem persists.
I tested each motor SEPERATELY with a different PWM receiver. Slowly spin up. Spin down. Seems no problem with any motor.
Here is my log:
Quad is on floor. Put low throttle. All motors spin up same time.
I moved stick left/right for roll, and then same for pitch. (to see in logs)
Held copter in hand, and throttle up very slowly over 20 sec… after about 55%, motors on one side suddenly ROAR to 100%.
Sometimes when I do this, I immediately push throttle down to 0%. Motors are still spinning 100% for 10+ sec.
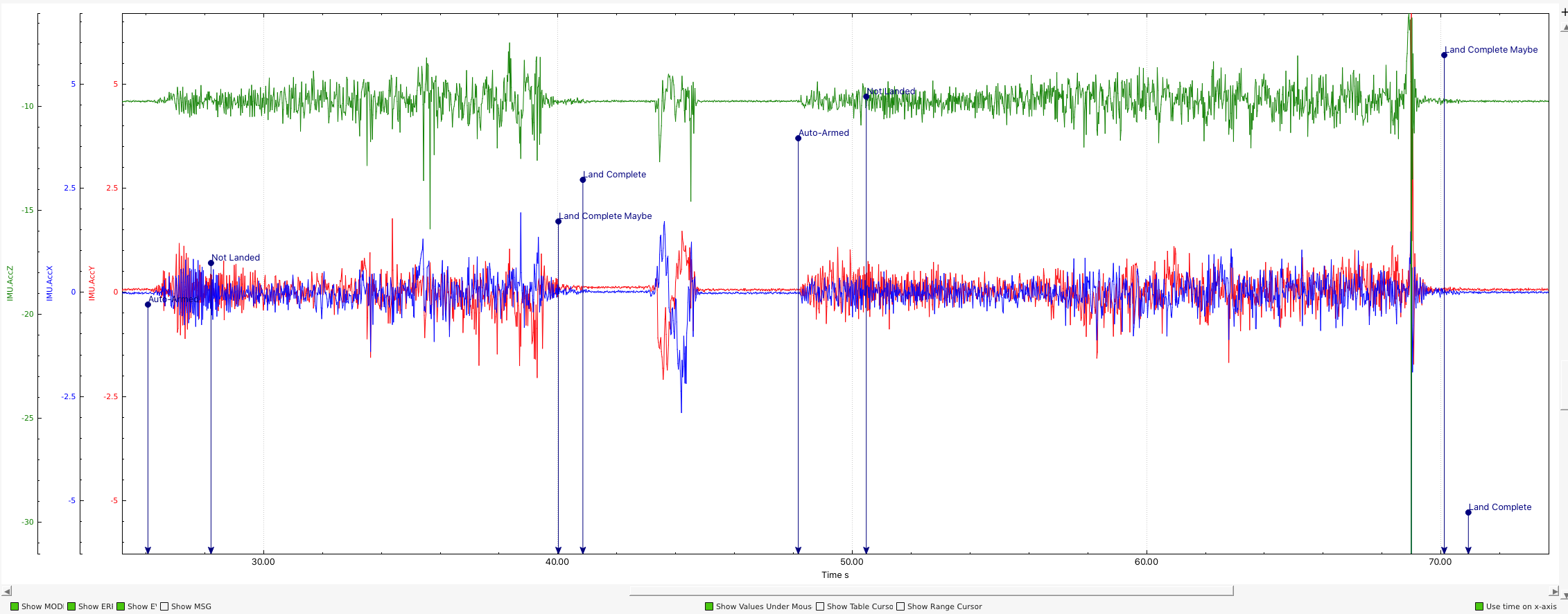
I changed the log bitmask. Checked all options include IMU_FAST IMU_RAW.
I see gyro and accelerometer… wow looks like crazy earthquake.
Stabilize mode. Quadcopter is on kitchen floor. I do quick left/right rool and forwar/back pitch test. Then, 2 slow throttle up attempts to just hover… Last 2-5 sec it was maybe 1 cm off the ground.
Is the vibration in accelerometer and gyro causing my problems?
I have a thin, maybe 2mm double sided sticky pad. Maybe foam sponge?
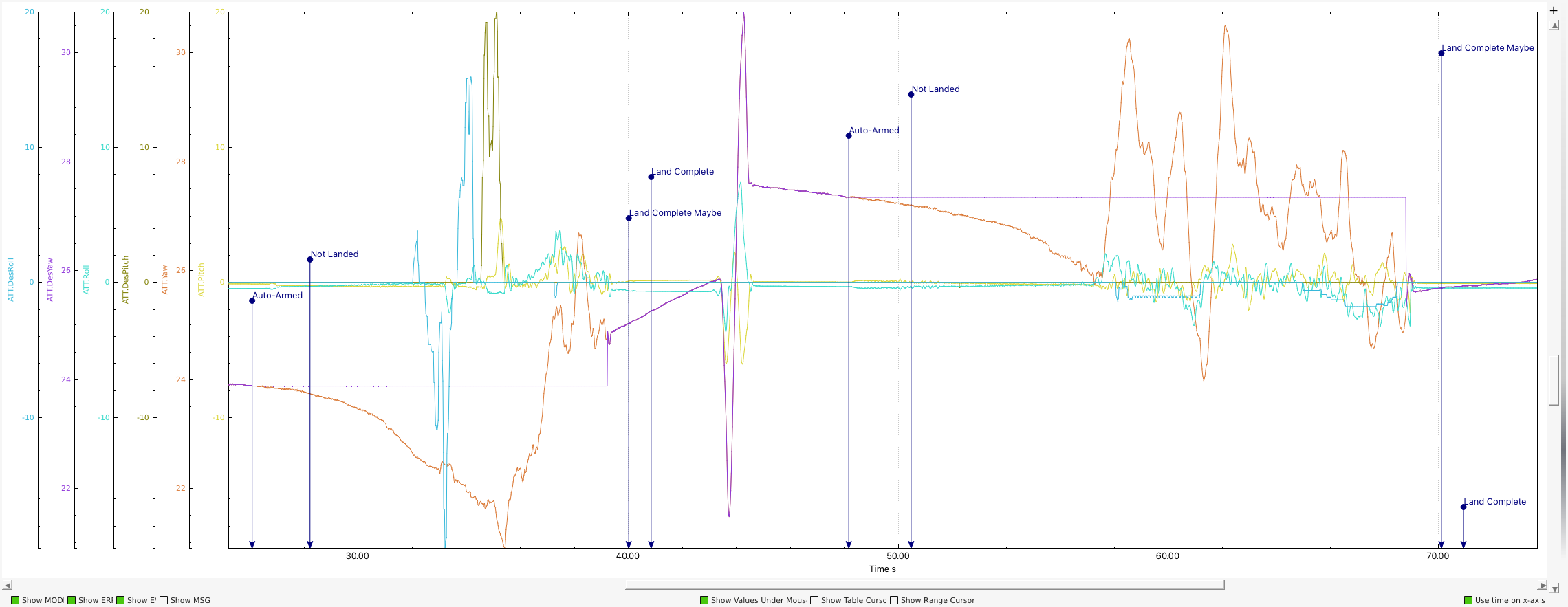
Looking at desired versus actual I see a problem with yaw.
Have you calibrated the compass?
Is the compass direction correct?
Have you got the compass near electrics?
Your questions:
Have you calibrated the compass?
yes many times. I went back to internal. The external was too slow. Can it cause these problems?
Is the compass direction correct?
On the bench, yes.
Have you got the compass near electrics?
There are no ESC or big power near APM. Rx sitting next to APM and GPS/compass on top.
I just want to clarify the situation.
This is a 7x4x3 APM 2.8 3s drone that I have been flying since approx July 2019.
The APM 2.8 is mounted on 2mm pad, and then a 15mm foam block, and then ext GPS/compass.
For couple week flying with default PID tuning & Copter 3.2.1 OK. No problem with Stabilize and AltHold, although I never got RTL working. Failsafe in Mission Planner and Radio are both to -100% throttle.
Had a couple mysterious crashes - 300m+ pitching down to fly back, but it was pulling back and just took off by itself, and crashed into trees.
Wobbling in roll. Reduced Pitch/Roll from default 0.15 to 0.109. Stabilize and AltHold still OK. Lots of training flights where quad is just arm’s length in front like dog on leash. Had another tree crash.
I disconnected the ground & 5V BEC from one ESC to power camera.
Very severe wobbling, and it immediately takes off by itself.
Throttle down 100% - no response. Disconnect transmitter. Its still flying by itself. After it hit tree and broke propellers, managed to pin it down with shoe. With a prop still spinning 100%, managed to disconnect battery.
Ofcourse, I went back to previous config - reconnect ground. Same problem. Switch beeping front left motor with front right. Solder the ESC ground and signal cables to APM 2.8 pins - I have not checked the ESC cable joins for damage.
What can cause the motors to spin up to 100% by themselves when transmitter throttle is set to medium and then 0%?
I have been using the same FS i6 with a Betaflight 9" quad without problems.